通过将R-Car V3M入门套件与支持的软件和工具结合起来,系统开发人员可以轻松地开发前置摄像头应用程序,从而减少开发工作,实现更快的上市时间。
瑞萨还通过整合高性能卷积神经网络(CNNs)的一种新型高效的硬件加速器,宣布R-Car V3M的增强,使得道路检测或对象分类等功能越来越多地应用于汽车应用。
CNNs是一种深度的、前馈的人工神经网络,已经成功地应用于分析视觉图像,并越来越多地应用于汽车的道路检测或对象分类等应用领域。R-Car V3M的创新硬件加速器能达到超低功耗水平,这样的水平是CNNs在CPU或GPU上运行时无法达到的。
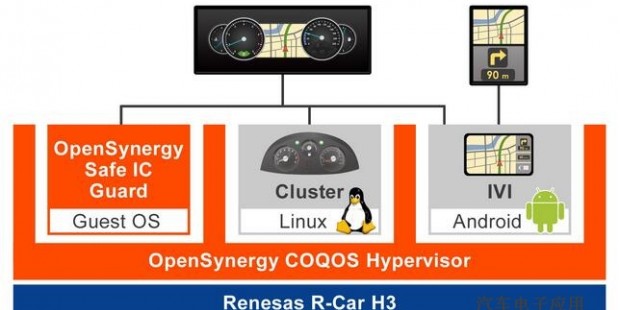
新的R-Car V3M入门套件,R-Car V3M SoC,,以及包括瑞萨的开源e2 studio IDE集成开发环境(IDE)在内的支持软件和工具,是瑞萨用于研发ADAS和自动驾驶的Renesas自主平台的一部分,提供从云到传感和车辆控制的完整的端到端解决方案。
新的入门套件是随时可用的。除了所需的接口和工具之外,该工具包还为ADAS和自动驾驶开发提供了必要的组件,包括2GB RAM、4GB eMMC(嵌入式多媒体控制器)内置内存、以太网、显示输出以及用于调试的接口。eMMC板载内存允许从入门套件工具包启动操作系统,这比通过网络操作要快得多。
集成的440 - pin扩展端口为系统制造商提供了充分的自由,为广泛的计算应用程序开发特定于应用程序的扩展板,从简单的高级计算机视觉开发环境,到多摄像头系统的原型,如环绕视图。除了保持高度的软件可移植性和可重用性外,这种扩展板的灵活性减少了硬件开发所需的时间。
R-Car V3M 入门套件由Linux版支持包(BSP)支持,进一步的商业操作系统将从明年开始提供。
瑞萨能够在R-Car V3M 入门组件上提供几个工具,包括瑞萨 e2Studio工具链和调试工具,以减轻开发负担,并实现更快的上市时间。
包括Cogent在内的合作伙伴开发了一个3D环绕视图停车辅助系统,他们正在使用R-Car V3M入门套件工具包来加速开发。
除了R-Car V3M 入门套件之外,瑞萨还为CNNs实现了超低功耗,实现了对R-Car V3M SoC的图像识别和图像分类。R-Car V3M允许在NCAP摄像头中实现高性能、低功耗的CNN网络,而传统的高功率消耗CPU或GPU架构无法实现。
瑞萨补充了IMP-X5,这是一个由图像处理器和可编程的CV引擎组成的计算机视觉处理子系统,它有一个全新的,创新的CNN硬件加速器,能在超低的低功率下实现高性能的CNNs。
使用这个新的IP,瑞萨使系统开发人员可以在IMP-X5或新的硬件加速器之间选择部署CNNs。这种异构的方法允许系统开发人员选择最高效的体系结构,这取决于所需的编程灵活性、性能和功耗。
在2018年第一季度,一款带有Linux BSP的R-Car V3M入门套件将在有限数量的情况下上市,一个完整的提供扩展软件解决方案的产品将于2018年第三季度上市。
来源:汽车制造网
作者:徐婷