在FANUC机器人上面通过传感器测量坡口的截面积数据并发送给机器人,基于提前设定的算法改变焊接速度和摆动频率,同时结合多激光层多道焊接指令,可以根据预设的数量自动实现焊接层数及道数的调整。
目前FANUC和ABB机器人上面实现以上功能。
TH6-激光焊缝跟踪系统
基本原理
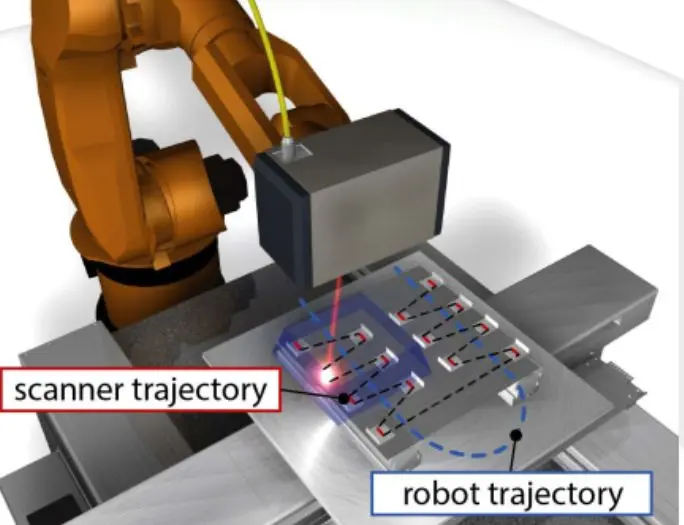
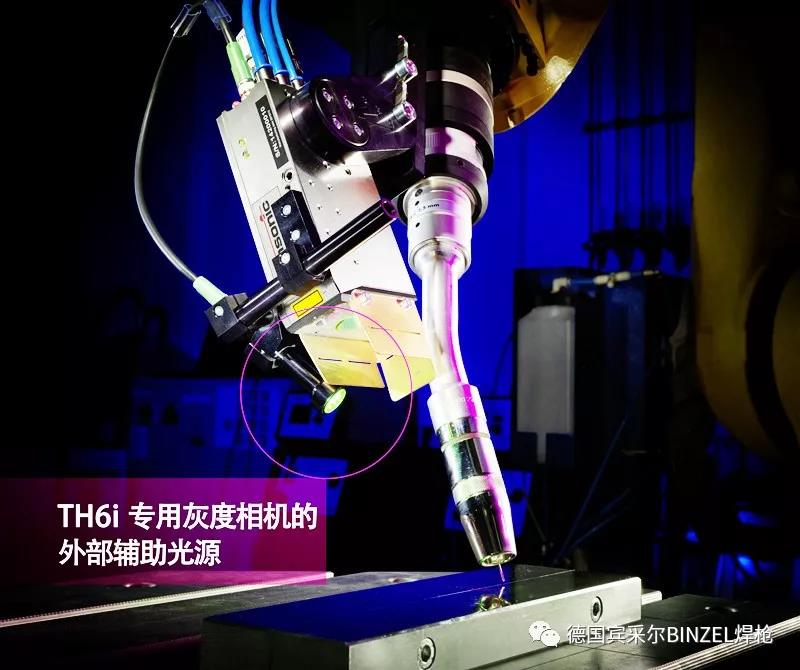
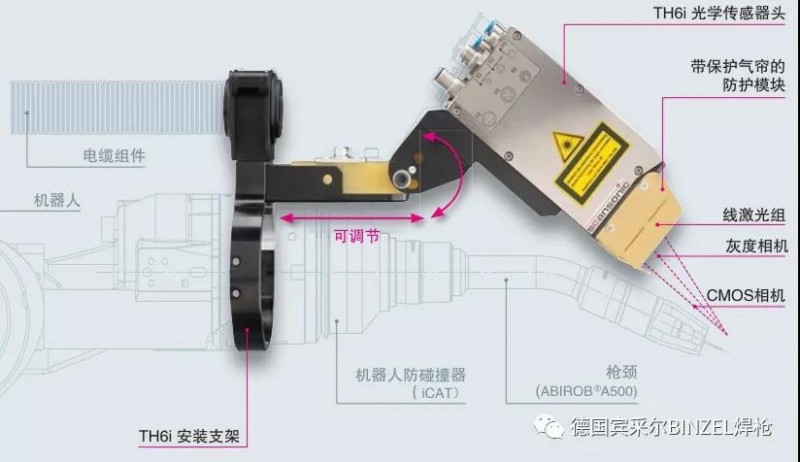
根据激光三角测量原理,通过标线器生成并投射到组件上。由CMOS传感器记录在相机镜头的视野内产生的漫反射。可以用激光三角测量来确定工作距离、位置和形状。TH6i配备了额外的摄像头(灰度摄像头)来检测对接焊缝。为了达到这个目的,工件被绿光照亮,从而降低了边缘的亮度。灰度摄像机通过可见的对比度线来探测被照亮的表面,通过这种方法最小可以识别0.02mm的对接焊缝。
应用
宾采尔TH6X系列焊缝跟踪系统铺设了一条通向完美焊缝的途径:激光线组和摄像机采集的母材和焊缝数据经过处理后,用于对焊缝位置的实时识别与校准,无需接触母材,不受外部系统与焊接工艺影响,并且适用于各种焊接材料和各类焊缝类型。
优点
适用性广泛
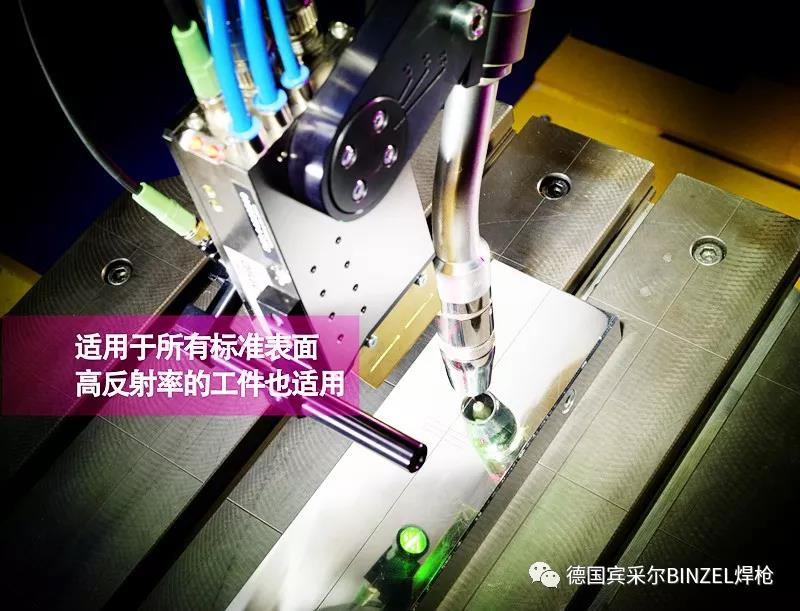
适用于所有常见的焊缝形状
适用于薄层和厚板应用程序
适用于所有标准表面,尤其是反光和高光的铝、不锈钢等材质
支持多种机器人通讯接口
高精度
通过三条平行激光线实现焊缝的精确定位以及焊枪的轨迹校正
对复杂的焊缝拼接形式的超水准的识别
稳定的数据采集性能
TH6D可检测到宽度大于0.3mm的对接焊缝
TH6i可检测到宽度大于0.02mm的对接焊缝
抗干扰性强
保护气体形成气帘,保护探测头光学组件;采用气冷,适应外界温度变化
防飞溅物,防水外壳
光学过滤干扰光波
受电场影响极小

TH6D系统概述
TH6D焊缝跟踪系统有两种版本,以适应与不同厚度的木材的焊接(厚板、薄板);这两个版本有不同的分辨率和测量范围。TH6D可以稳定的检测出0.03mm以上的焊缝。
TH6i系统概述:0.02mm可检测
与TH6D相比,TH6i有一个额外安装的灰度摄像机系统。经过检测证明TH6i传感器可以检测到最低0.02mm的对接接头。
TH6i主要用于薄板焊接。
基本参数
测量线:3
工作高度:150mm
工作频率:60-240Hz
TH6D(WxHxD):70*40*100mm
TH6i(WxHxD):70*40*140mm
使用温度:10℃--45℃
TH6D技术参数
TH6D-150-CF用于薄板焊接
测量范围(W,L):±8mm,±12mm
分辨率(W*L):0.03*0.07mm
TH6D-150-GF用于厚板焊接
测量范围(W,L):±16mm,±35mm
分辨率(W*L):0.06*0.09mm
TH6D-150-KF用于厚板焊接
测量范围(W,L):±22mm,±40mm
分辨率(W*L):0.08*0.12mm
TH6i技术参数
TH6i用于薄板精密焊接
测量范围(W,L):±8mm,±12mm
分辨率(W*L):0.03*0.07mm
灰度相机:最小可检测0.02mm对接间隙



动力电池盒焊缝跟踪
汽车零部件焊缝跟踪

石油管道焊缝跟踪