最近儿童骑车倒地遭撞车的事故一直让大家很揪心,朋友问起AEB自动紧急制动功能能否避免类似的事故。今天就让小星来聊聊AEB的工作原理的工作原理是什么?它是如何识别前方障碍物并在必要时自动刹车的?以及它能否避免类似的事故吧。

沃尔沃卡车AEB自动紧急制动CitySafety
先说结论后面详聊,很遗憾的是虽然包括沃尔沃等汽车厂商的AEB自动紧急制动系统越做越完善,但是大概率还是无法避免这样的事故。因为归根结底汽车还是需要依靠传感器的目标识别,也称模式识别。那么对于这次的摔倒事故以及美国著名的无人驾驶出租车撞死骑车人案例(推行自行车)都是无法被完美识别的特例。由于法规的成文规定,事故的第一责任人是驾驶者和行人骑车人。AEB自动紧急制动系统有明确的误报率强制指标,更倾向于宁可为了不误报而错误制动也不采取动作。换句话说AEB可以理解成心慈手软的刘备,宁可天下人负我也不能我负天下人。后面我们详聊具体背景。
AEB的工作原理
欧洲NCAP引入AEB自动紧急制动(来自NCAP)
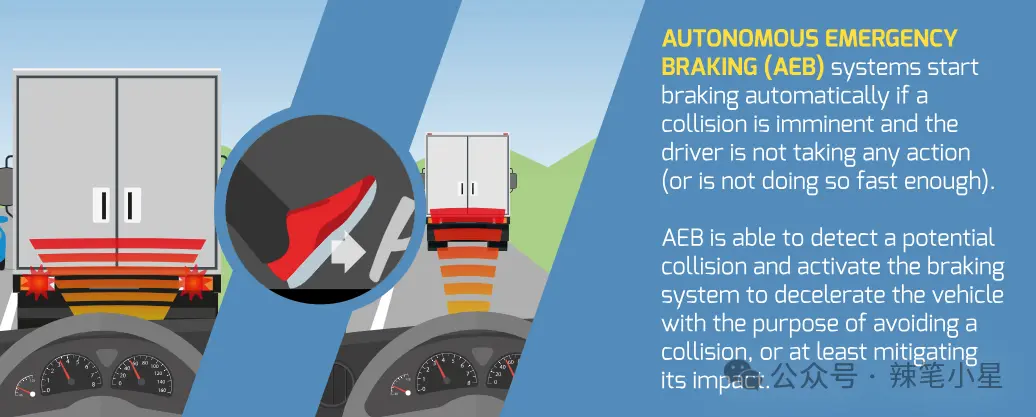
自动紧急制动(AEB)系统是一项先进的车辆安全技术,能够在检测到潜在碰撞风险时自动激活制动系统。它的主要目的是避免碰撞或减轻碰撞的影响,特别是在驾驶员反应不及时的情况下。这项技术对于大型车辆如卡车尤其重要,可以有效预防追尾事故。AEB系统通过主动介入来提高道路安全性,在驾驶员无法及时反应的紧急情况下发挥关键作用,从而显著提升车辆的整体安全性能。
AEB紧急制动的工作过程
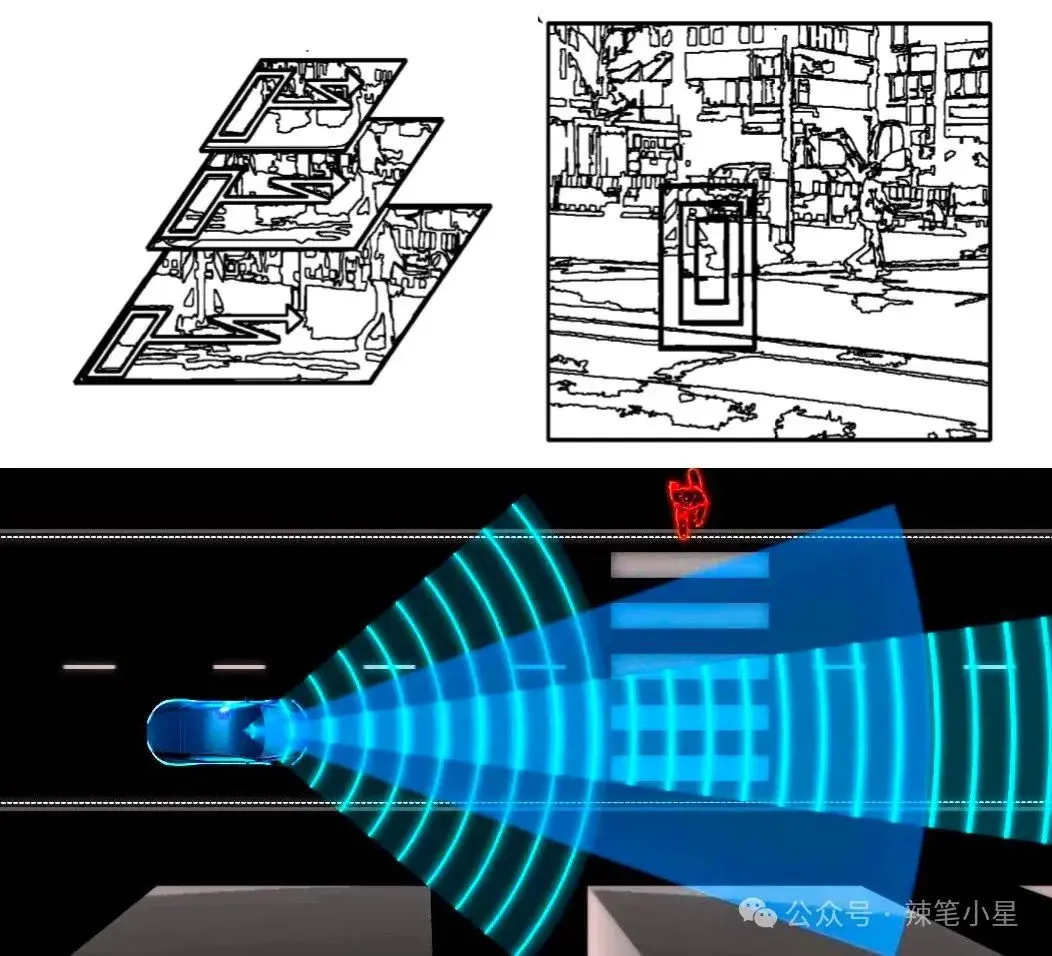
数据采集和融合:雷达、激光雷达、摄像头和超声波传感器不断采集前方环境数据。通过数据融合技术,系统可以生成一个详细的环境模型,包括前方物体的大小、速度和相对位置。险评估:控制单元(ECU)使用特定的算法评估碰撞风险。这些算法通常包括运动预测、物体分类和路径规划等。系统会评估物体的运动轨迹和车辆的行驶路径,判断是否有可能发生碰撞。警告和干预:当系统检测到潜在碰撞风险时,会先向驾驶员发出警告信号,如视觉、听觉或触觉提示。如果驾驶员未能及时反应,系统会自动介入,采取制动措施。自动刹车:在驾驶员未能及时反应的情况下,AEB系统会自动施加制动力,减缓或完全停止车辆,以避免碰撞或减轻碰撞的严重程度。
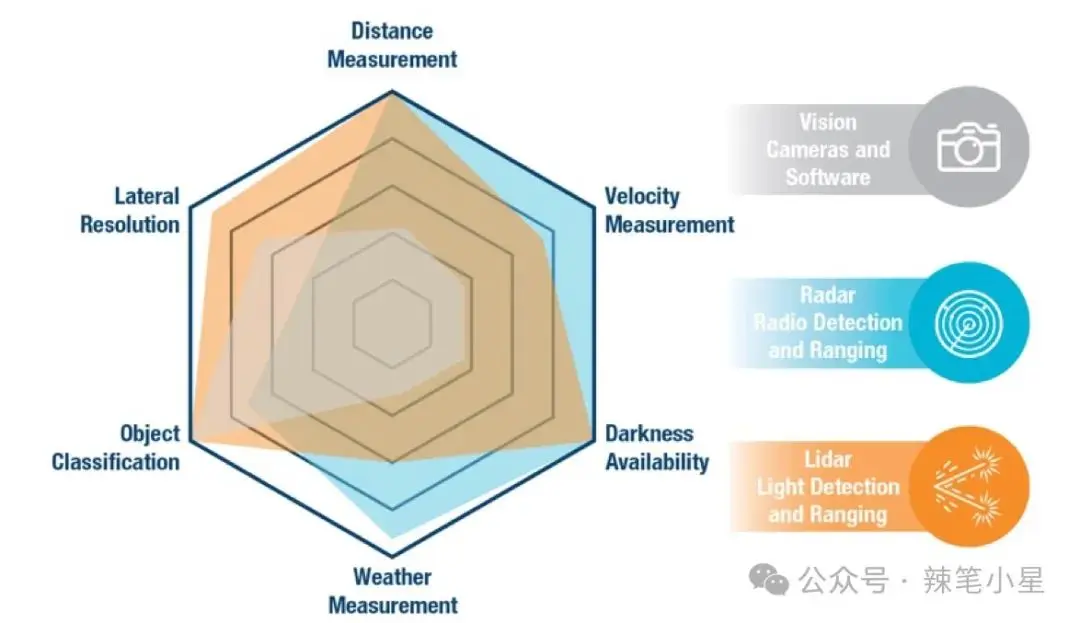
AEB紧急制动相关传感器性能对比
AEB系统的核心在于其传感器和控制算法。它通常依靠以下几种传感器:
雷达传感器:主要用于检测前方较远距离的物体,适合高速行驶时的物体识别。
激光雷达(LiDAR):具备高精度,可以检测较小的物体,适用于低速和城市道路环境。
摄像头:用于识别交通信号、行人和其他车辆,通过图像处理算法确定障碍物的类型和距离。
这些传感器通过数据融合的方式,提供给控制单元(ECU)一个综合的前方环境图像。ECU通过复杂的算法,实时分析传感器数据,判断是否存在碰撞风险。
AEB传感器迭代

老款沃尔沃XC60基于激光传感器的城市安全系统
配置激光传感器的City Safety功能的老款沃尔沃具有了紧急刹车功能。这种激光传感器可以探测三个固定的角度(左、中、右),并可有效探测6米内的物体。激光传感器只能够识别物体距离却不能感知它的颜色。一套额外的雷达传感器被放置在前进气格栅处用于进行长距离的物体探测。下图为具有City Safety和车道偏离警告功能的沃尔沃车型内后视镜模块。左侧为激光传感器,右侧为雨量传感器,中间为摄像头传感器。

全新沃尔沃XC90搭载雷达摄像头集成传感器RACam
为了解决单一传感器的性能瓶颈,传感器融合技术应运而生。新一代的传感器将摄像头雷达传感器信号的融合可以非常可靠的识别周围的物体。使用图像和微波信号双重确认物体保证了识别的准确率。

新一代AEB传感器
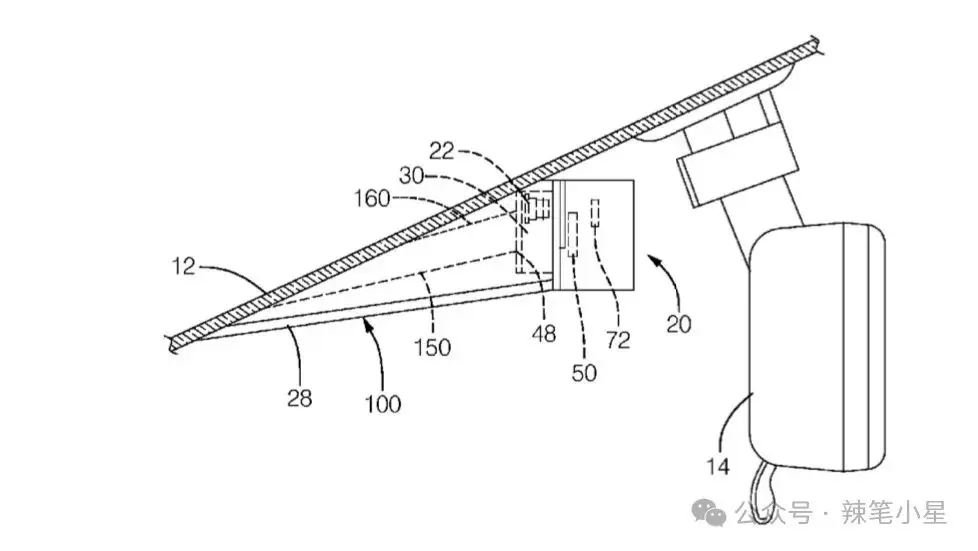
雷达摄像头融合传感器专利解读
为了和摄像头传感器集成在一起,77G雷达必须考虑穿透成一定角度放置的挡风玻璃。并且考虑玻璃镀膜的反射效应。放置在内后视镜位置相较于前保险杠位置视角更高,因此需要更强大的垂直方向雷达电子扫描能力。
雷达摄像头融合传感器专利图
通过信号融合,雷达传感器和摄像头传感器可以在距离探测、速度探测、暗处使用效果、恶劣天气使用效果、目标分级和分辨精度方面优势互补。雷达微波信号兼顾长距离和近距离,而摄像头图像信号覆盖中距离。而且对于同一个追踪目标可基于不同传感器给出多层次信号。包括距离、速度、外形和颜色等信息。
图像和雷达微波信号双重确认物体
AEB系统通过集成多种传感器技术和先进的控制算法,显著提升了车辆的主动安全性能。在未来,随着技术的进一步发展,AEB系统将变得更加智能和高效,为行车安全提供更有力的保障。在AEB系统在各种行车条件下更高可靠性和有效性的同时,驾驶者和行人骑车人仍然是事故的第一责任人。愿类似的悲剧不再发生吧。
来源:辣笔小星