0 引言
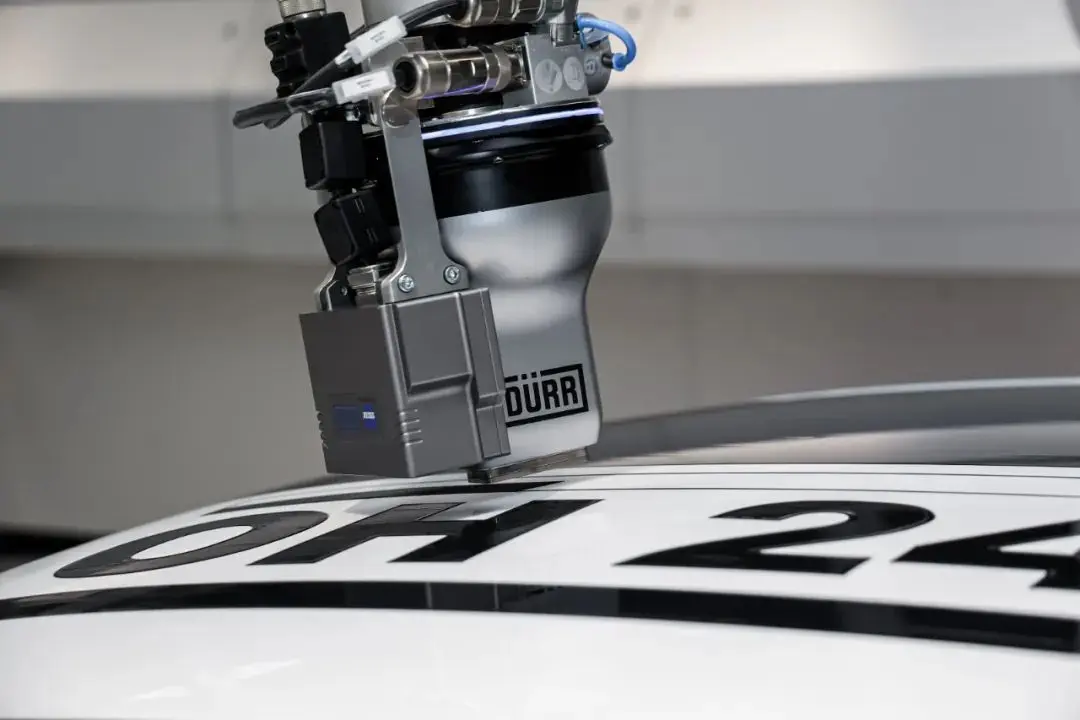
汽车行业的蓬勃发展,极大的提高了汽车生产行业的生产空间,同样汽车涂装领域也伴随着产能的提高向着高科技、高效率、高品质的方向快速发展。其中DURR机器人在涂装领域的应用最为广泛且技能成熟。涂装领域自动化应用有喷涂机器人、涂胶机器人、火焰机器人,DURR机器人均有涉猎并且在行业中享有较高的荣誉。
任何设备在正式使用前都将经过一个调试设备时的问题爆发期,DURR机器人也一样,在调试过程中出现PLC通讯信号中断、计量泵出入口压力误报警、旋杯转速反馈值异常、机器人与输送链间信号传递异常导致的撞车、车型信息叠加现象导致的撞车、机器人CTEI通讯模块故障等等,本文主要针对旋杯转速反馈值异常问题引出的现象及与旋杯转速相关部件作用及功能的说明,从而探讨出两个方向不同的表象及解决措施。
1 问题发生背景及现象
某公司应用高自动化生产线体,其中喷漆室包括内外板自动喷涂技术、内外加电技术,目前日产量在1000台左右,在正常生产一周的情况下,某一天车间甲班、乙班进行日常的交接班工作,甲班接班完成后开机进行日常准备工作,车间的日常开机流程中要求在进行生产前进行一次长冲洗和一次喷车模拟工作,以用于在过程中观察机器人喷涂轨迹、扇幅等方面是否存在问题。就在车间人员进行长冲洗工作时,机器人移动到清洗位置后,其中一台机器人出现无旋杯转速值的故障,无法进行清洗,人员进行复位操作也无法将此报警消除。此次故障问题使车间停线供给约480分钟才彻底解决完成。
2 问题真因查询及解决过程
在某一天正常交班过程中,开线前准备工作,操作机器人进行长冲洗程序,在机器人清洗过程中突然发生报警,导致某一台机器人无法继续执行程序,人员进行故障复位仍无法解决问题,通过观察机器人上位机界面发现在执行清洗程序时,马达转速反馈值为0。因为机器人开启主顶针需要马达空气的供给,清洗程序中有设定马达转速的设定数值,在机器人检测实际反馈转速值与设定转速值不匹配且在几秒内不能恢复正常的情况下,发生马达转速异常报警,导致线体停线。下面我们通过几个方面分析来深入了解旋杯转速反馈值问题相关联部件、关联部件功能并逐步渗透解决问题。
2.1 与旋杯转速相关部件
2.1.1 雾化器光眼
图①为法兰盘,此处与雾化器紧密贴合,但因一些异常操作(如错误的人工擦拭方式)将会导致光眼受到漆液的污染,从而使光信号无法感应或感应错误,出现旋杯转速信号无法反馈或反馈数值异常现象。
图②为马达内部光暗面,马达转动过程带动光暗面的转动,通过光眼将感应到的光、暗信号传递给光电转换器,从而检测马达的转速及正反转状况。
2.1.2 空气比例阀
DURR机器人空气比例阀分为马达空气比例阀和成形空气比例阀,用于调节供给雾化器马达空气及成形空气量。其中,马达空气与旋杯转速的实际值有必然性关系。
2.1.3 光电转换器
每个光电转换器拥有两个光纤接口,应用于对马达转速、计量泵出入口压力值经光信号转换为电信号。在马达转速检测方面,光电转换器一方面通给比例阀进行马达转速的监控,一方面通给马达刹车空气电磁阀用于对刹车空气的空气,两方面共同实现对马达转速的检测和控制。
2.1.4 光纤
连接光电转换器与法兰盘光眼间采用光纤连接进行信号传输,通过光纤对马达内部镜面反射光的感应将检测的马达转速传递给光电转换器。
2.2 问题解决思路
确认并梳理问题发生相关情况及难易度分析,见表1.
表1 问题发生相关情况及难易度分析
|
序号 |
与问题相关部位损坏/故障情况 |
故障现象 |
发生可能性 |
问题解决/部件更换难易度 |
|
1 |
雾化器光眼污染 |
旋杯转速异常高/低并发生报警、旋杯转速无反馈值 |
较高 |
简单 |
|
2 |
空气比例阀故障/损坏 |
旋杯转速无反馈值 |
较高 |
较难 |
|
3 |
光电转换器故障/损坏 |
旋杯转速无反馈值 |
较低 |
较难 |
|
4 |
光纤接触不良 |
旋杯转速异常高/低并发生报警 |
较低 |
较简单 |
|
5 |
光纤破损至损坏 |
旋杯转速无反馈值 |
较低 |
难 |
|
6 |
马达内部污染 |
旋杯转速异常高/低并发生报警 |
一般 |
较难 |
根据发生故障可能性及解决难度确认排查顺序。
1)在出现旋杯转速出现异常高/低并发生报警时,可能原因为:雾化器光眼污染、光纤接触不良、光纤破损至损坏。
首先检查雾化器光眼处是否受到污染,进行简单保养处理;检查光电转换器处光纤接触情况,进行紧固;更换光纤。
2)在出现旋杯转速无反馈值时,可能原因为:雾化器光眼污染、空气比例阀故障/损坏、光电转换器故障/损坏、马达内部污染。
首先检查雾化器光眼处是否受到污染,进行简单保养处理;检查空气比例阀指示灯是否出现异常,进行更换马达空气比例阀;更换光电转换器;拆解雾化器马达,通过光眼探测通路观察马达光暗镜面是否有污染,如有污染进行拆解清理。
2.3 本次问题解决过程
1)拆解机器人雾化器,对法兰盘与雾化器接触处部位(特别注意光眼位置)进行擦拭、清理,在确认好密封圈状态(是否缺少密封圈或密封圈损坏)后重新进行安装;
2)重新安装雾化器后仍未解决问题,此时对马达空气比例阀、光电转换器进行更换。(需注意在安装比例阀时,信号线、空气管、电源线的安装位置、牢固性及线的放置不会因为机器人仿形动作导致松动)
3)在更换比例阀及光电转换器后经测试仍没有旋杯转速的反馈信号,此时将考虑范围关注到光纤处,在更换光纤过程中发现,机器人轴与法兰盘连接处已让清漆凝结(如图⑦所示),在拆解掉法兰盘后发现机器人5轴内保护管包括法兰盘连接处漆管、气管均有清漆凝结(如图⑧所示)。
4)将5轴整体进行更换,同时更换光纤,更换完成后进行测试,问题得到解决。
2.4 问题发生原因
因法兰盘处连接清漆管路出现破损,导致清漆泄露至机器人5轴内及法兰盘附近,长时间下去清漆发生凝结并将破损口处凝结,所以未出现机器人轴节处渗出清漆的现象,凝结后的清漆在机器人运动过程中与5轴内保护软管摩擦,使保护软管发生破损,破损后的软管及凝固清漆在机器人运动过程中与光纤出现摩擦,长时间摩擦导致光纤的损坏,故无法传递信号至光电转换器处,将无法将马达转速值反馈至人机界面中显示。
在日常维护中需要定期对机器人5轴内状态进行查看,对已损坏的保护软管进行及时更换。(可通过采购内窥镜的方式对5轴内部软管状态进行检查)
3 结语
本文主要介绍在整车厂应用DURR机器人生产过程中发生的一项典型性常见问题,针对此问题对DURR机器人雾化器、空气比例阀、光电转换器、光纤等部件作用进行简单分析,并通过部件作用将问题发生时表现状况分为旋杯转速无反馈数值和旋杯转速反馈值高/低两方面去检查问题,并通过对部件的故障频次及更换解决的难易度进行排序,从而加快了解决问题的速度。笔者认为,在解决现场实际问题时,应本着以尽可能减少车间停线时间为主,以高效率、高准确的解决方案进行分析、排查。通过对问题的分析能找到最快的解决问题的办法从而得到使用方的认可是我们技术人员应具备的技能、能力。
在日常生产过程中,维护保养工作必不可少,针对于DURR机器人这样高科技、高精密设备,维护保养工作显得格外重要,我们除了需要每天对雾化器成形空气罩进行简单的浸泡、擦拭等这些重要部位的维护保养,也要定期对那些不常见问题的部位进行检查。本次问题的发生,清漆管路的破损虽然是问题发生的直接性原因,同时与维护保养人员在日常工作中或定期的点检、保养不到位也密不可分,若前期早早发现清漆管路的泄露也不会产生这么大的损失。所以我们需要加大对一些可能发生但很难出现问题的部位的定期检查项,严格按照DURR专业人员的指导要求进行操作。