当前,机械方案设计主要采取形态学矩阵法、键合法、专家系统3种方法。形态学矩阵法及键合法主要从功能角度对方案进行组合分析,然后将组合好的方案一一列出,由于组合出的方案数目很多,因此要对其进行逐一评价比较困难,难以获得最佳的方案。专家系统的问题主要在于知识获取和推理比较困难。因此,需要改进机械方案设计方法,提高设计系统的智能性。汽车机械系统的智能设计实际上就是一个实例推理和匹配的过程。关于汽车机械智能设计的研究已经取得了如下成果:唐爱坤等基于改进遗传算法对汽车散热器进行优化设计,优化了汽车散热器的结构;崔凯等基于实例推理对柴油机进行匹配设计;邱健基于Hybrid cbr对汽车散热器进行智能设计。 关于案例推理(case based reasoning,CBR)和规则推理(rule based reasoning,RBR)的混合推理在汽车机械系统智能设计中的应用研究较少,因此本文提出基于CBR和RBR的汽车机械智能设计系统,试图提高产品设计效率。
1 汽车机械智能设计系统的总体结构
汽车机械智能设计系统通过构建知识案例库,可以最大限度地应用设计师长期积累的经验,减少概念设计中的重复工作量,提高汽车机械系统的设计研发效率,缩短研发时间。根据汽车机械系统研发中遇到的问题(如知识匹配工作量大),构建汽车机械知识案例库和辅助信息库,对汽车发动机、散热器、齿轮等关键部件及整机性能进行分析。使用合理的知识表达方式构建的汽车机械智能设计系统的总体结构如图1所示。用户通过友好的用户界面,输入汽车的设计要求,完成汽车机械系统的总体选型和功能设计,通过推理过程完成汽车机械各关键部件的结构设计和参数设计,若设计结果不满足设计要求则重新设计。

图 1 汽车机械智能设计系统结构框图
2 汽车机械智能设计系统基础类库的构建
汽车机械系统涉及到的零部件数量较多,因此需要构建信息量庞大的知识库。系统设计人员通过查阅汽车机械系统智能设计的相关文献资料,并和行业设计专家进行交流,确定知识库的知识涵盖范围和知识表达方式,实现知识的简单、准确调用。本系统采用基于本体的方式和自上而下的方式对汽车机械系统进行本体知识建模,首先明确汽车机械系统的产品类、组件类、部件类、零件类及其分类,然后分别描述汽车机械系统的相关实体、属性、关系等元本体。设计的汽车机械智能设计系统的实例知识模型如图2所示,实例知识模型包括基本信息、产品信息及工程知识3部分,其中基本信息
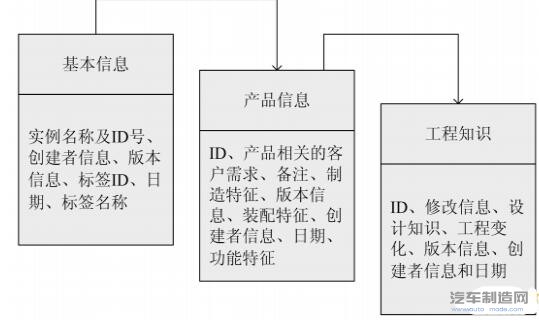
图 2 实例知识模型
定义实例数据内容,产品信息记录设计实例的详细信息,工程知识包括设计知识和工程设计者的经验。
2.1 案例库的构建
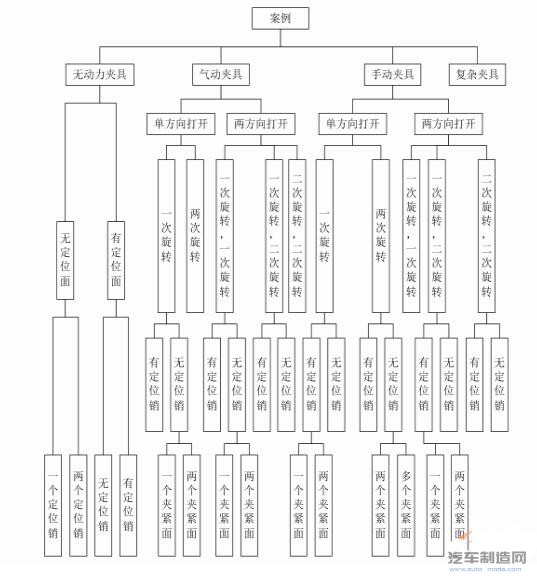
案例库涵盖了很多汽车机械零件的产品信息,包括产品的具体结构功能参数、型号、功率和用途等。对于不同的案例,根据不同的属性参数可以采用成组技术进行分类管理。案例库构建完成后,以*.dat文件格式进行存储,存储类型为“案例名称+空格+各元件编号”,方便系统运行时的检索匹配以及对各参数的提取调用。由于汽车机械零件种类很多,案例库不一一论述,现以汽车夹具单元案例库为例描述案例库的结构,构建的汽车夹具单元案例库如图3所示。
2.2 数据库的构建
数据库不仅能为机械零件过程决策提供基础数据支持,还能为知识库、规则库及实例库等提供底层数据源。本文结合知识存在的形式及实例表达,设计机械知识数据库,其属性关系及主要数据库表如图4所示,包括对象表、部件表、设备信息表、工艺方案表、零件失效信息表等数据表。
3 推理过程中需解决的关键问题
应用CBR和RBR两者结合的推理模式,需要解决案例定位和案例相似度两方面的问题。解决案例相似度问题之前,先假定案例参数:已存在案例C=(c1,c2,…,c n),需要解决问题案例p=(p1,p2,…,p n),已存在案例对象ci=(c1,c2,…,cm),问题案例对象pi=(f1,f2,…,fm),以上述假定为基础定义相似度,见式(1)和式(2)。
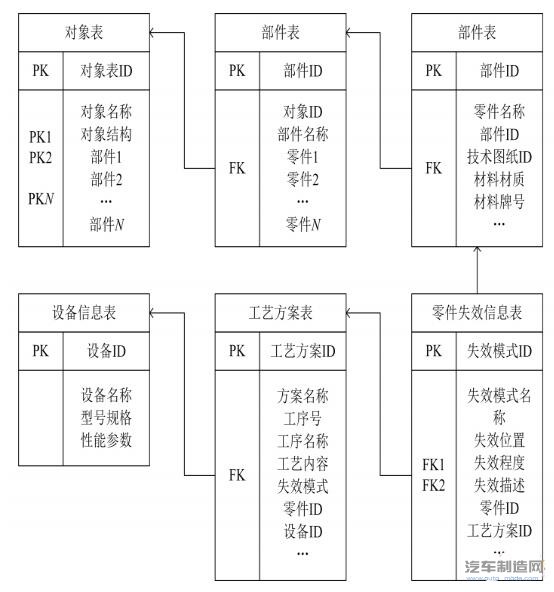
图 4 工艺知识数据库逻辑关系

式中:sim(P,C)为需要解决问题案例和已经存在案例的相似度;pi为问题的第i个对象;ci为案例中第i个对象;wi为权重,指第i个描述符对案例的重要性;sim(pi,ci)为问题和案例中第i个对象的相似度;fi,bi分别为案例C中第i个对象的第i个属性值和问题案例P中第i个对象的第i个属性值;di为属性权重。
案例定位问题主要是指零件单元案例在汽车机械系统中的位置分布。设计师通过检索将案例或组件调入工位进行总成装配时,能否正确确定装配位置至关重要,在这个过程中需要对单元案例坐标和汽车车身机械坐标进行转换。因此,如何正确变换汽车车身机械坐标和单元案例坐标是目前需要解决的问题。本文中坐标的变换分为2步:1)对坐标系进行平移,让它和新的坐标原点重合;2)进行旋转变换,和坐标轴实现重合。
坐标转换用矩阵表示如下:
(x1,y1,z1,1)=(x2,y2,z2,2)·A·B (3)
式中:A为平移矩阵;B为旋转矩阵。

其中(x0,y0,z0)为新坐标系原点。

矩阵B中(i=x,y,z;j=1,2,3)是新坐标系原点。
4 结论
本文设计的汽车机械智能设计系统,采用CBR和RBR的混合推理流程对汽车机械系统进行设计,应用前景十分广阔。在今后的研究中,将进一步完善汽车机械智能设计系统的知识库和案例数据库,为使用者提供更多符合需求的汽车机械系统知识,从而更好地完成汽车机械系统的设计,获取更加精准的检索实例。