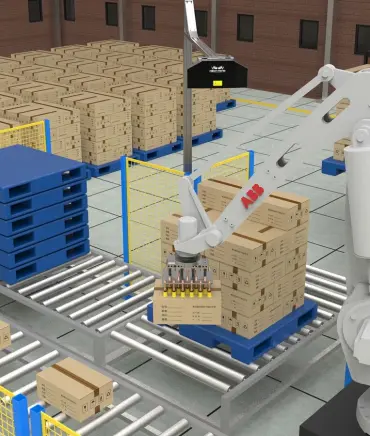
当安装奥迪RS 5 Coupe车顶时,工人们借助KLARA机器人的辅助,完成了粘合剂的涂装。其车顶材质为碳纤维增强复合材料(CFRP)。这标志奥迪首次为旗下Ingolstadt工厂配置HRC轻型机器人,用于车辆的最终装配的粘合剂涂装操作。
与常规机器人不同,KLARA无需采用防护栏,这意味着人类与机器在同一工作场地内开展协作,这极大地节省了装配生产线的占地面积,同时将人机协作整合到生产线中。

奥迪公司表示,所有设备部件均预装到基板上,便于KLARA机器人在短时间内完成安装及运营操作。若未对当前的装配线造成干扰,将完成机器人的整合。若采用其他方法为新款车型的车顶喷涂粘合剂,其成本将会高出很多。

那么很多人就会好奇为什么需要协作机器人?协作机器人是如何进行人机协作的?
首先,传统机器人部署成本很高。对于现代复杂的流水线作业来讲,在整个产线上为每一个使用机器人的工序都设计这些固定的外界环境需要耗费大量的资源,占用大片宝贵的车间面积以及长达数月的实施时间。而且,机器人的使用难度较高,只有经过培训的专业人士才能熟练使用机器人完成配置、编程以及维护的工作,普通用户很少具备这样的能力。
其次,传统机器人无法满足中小企业需求。传统工业机器人的目标市场是可以进行大规模生产的企业。而中小企业则不一样,它们的产品一般以小批量,定制化,短周期为特征,没有太多的资金对生产线进行大规模改造,并且对产品的ROI更为敏感。这要求机器人具有较低的综合成本、快速部署/重部署能力、简单上手的使用方法,而这些,传统机器人很难满足。
最后,传统机器人也无法满足新兴的协作市场需求。在绝大多数工厂中出于安全性考虑,一般都要使用围栏把机器人和人员进行隔离。但是人力成本的上升,很多其他以前没有或很少使用机器人的行业开始寻求机器人自动化解决方案。这个时候就需要一些额外的技术来保证机器人与人类可以安全的在同一个区域工作,而不需要栅栏这样碍事的东西挡在中间,即要求机器人具有安全协作的特性。

由于现在的机器人无法独立完成任务,必须安装适当的末端工具,增加必要的外部辅助设施以构成机器人工作站才能正常工作。因此当我们说的协作一般是指机器人系统与人之间的协作。
机器人系统的概念中包括工业机器人、末端执行器/工具、其他用来支持机器人完成任务的传感器、设备、机械设施以及外部轴等。
安全级监控停止和手动引导:即当人员进入协作区域时,机器人通过机械臂上的传感器感知到人超越安全距离,就会停止运动,并保证安全的静止状态以便操作人员执行某些操作;而当人员离开协作区域,与机器人处于安全距离外时,机器人可以自动恢复,并正常运行。另外,操作员还可通过手动操纵安装在机器人末端或者靠近机器人末端执行器的引导装置来控制机器人完成任务。

速度和距离监控:在这个模式下,允许机器人和人员同时出现在协作区域中,但是需要机器人与人员保持一个最小的安全距离。当二者之间的距离小于安全距离时,机器人立刻停止。人员离开后,机器人可以自动恢复运行,但仍然需要保持最小安全距离。如果机器人降低了移动速度,则安全保护距离也可相应地缩小。
速度和距离监控适用于协作区域内所有的人员。如果保护措施的性能受协作空间内人数的限制,则应在使用说明中注明允许的最大人数是多少。当超过该数字时,应触发保护停止。
功率和力限制:这是一种更为本质、更为高级、更为安全的协作功能,即对机器人本身所能输出的能力和力进行限制,从根源上避免伤害事件的发生。
在该模式下,操作人员与机器人系统的接触可能会发生有计划的接触或意外的接触。但对机器人所输出的功率和力进行限制,可以保证人在机器旁边安全的工作,同时不降低机器人的工作效率,不增加应用成本,这是当前主流协作机器人都应具备的重要功能。
对于这类人机协作而言,员工的安全是重中之重。在合作中,工人们始终掌控大局,指令应由工人发布的,且可随时中止该项进程。但需要强调的是,协作机器人并不是无条件安全的,在使用之前必须要进行风险评估,以确定合适的防护措施。