基于VPG 的整车平顺性仿真
2017-10-21 18:390
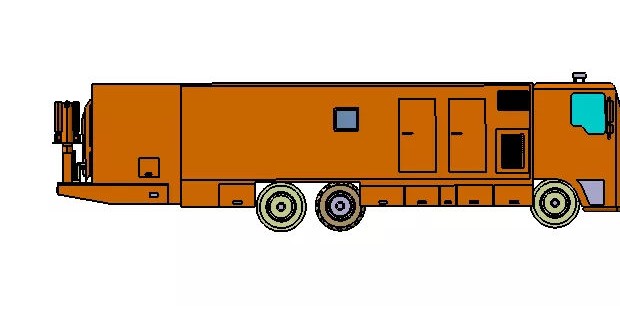
通过VPG 中的质量计算功能(CALCULATE MASS) 还可测得悬架、轮胎和车身的总质量为1334kg,前轴载荷41.3%,后轴载荷58.7%。同时,将整车的其他部件(例如发动机、变速器、驱动桥等) 的质量用一质点表示,附加到车身上,同时确定整车质心坐标,可直接在模型上选中理想节点。最后,通过依次点击Pre/ LOAD CARD/ GRAVITYPART,在模型中建立一个重力场,重力加速度值定为9.81,单位默认为m/ s2 。图15 即为最终完成的整车VPG 有限元模型。
图15 整车VPG 模型
2.4 路面模型的建立
在平顺性仿真过程中,不同的路面谱势必造成非线性振动响应的差异,依据«汽车理论» 的叙述,路面不平度是路面相对于某基准平面的高度。随着道路走向长度的变化,路面或微小或明显的高低起伏是引起车辆振动的最主要激励源。
对于车辆振动系统的输入,除了路面不平度这一参数,还应考虑车速这个因素,因为汽车轮胎乃至悬架对路面输入的响应还离不开汽车行驶速度的影响。当车速为v,路面空间频率为n 时,输入时间频率f 可由式(4) 求得。
f = nv (4)因此,根据车速v,可将空间频率谱密度Gq(n)换算成时间频率谱密度Gq(f)。对Gq(f)求导,还可得到速度功率谱密度,它们都为常数。
由GB/ T 7031—1986 规范可知,平顺性试验的车辆要行驶于B 级沥青路面或者C级砾石路面。本文将采用国标C级路面做仿真试验。
之所以如此选择是为了利用VPG 软件数据库。本文需要建立的国标C级波纹路面仿真路面模型正相当于美国MGA 标准下的Pave 路面。因此我们采取如下操作: 依次点击Road Menu/ SELECT FROM LIBRARY/ PAVE SURFACE/
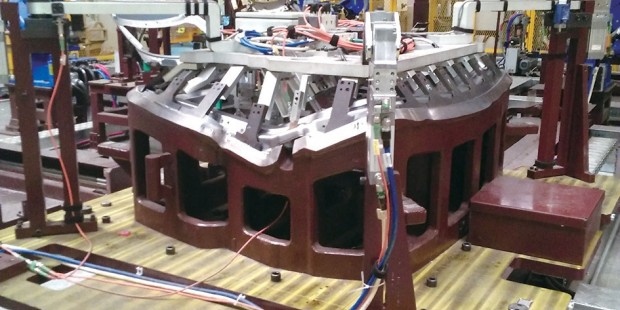
FIXED,即可直接调用所需的波纹路面。如果路面在创建后和悬架的位置关系不正确,可以用MOVE ROAD 命令重新定位。图16 即为本文所建的路面模型。
图16 MGA 标准砾石路面模型
完成路面的定位后,还需对轮胎与路面的接触进行定义。这么做的原因在于,VPG 实现轮胎与路面间的传力,需要定义它们间的接触运算。本文选用的路面与轮胎之间的接触类型为Contact_Automatic_Nodes_To_Surface (即单向接触),接触算法采用罚函数法(Penalty Method)。在VPG 中依次序点击Pre/ CONTACT INTERFACE/ CREATE 来创建接触条件。首先,将路面作为主面(MASTER),相应地将轮胎胎面定义为从面(SLAVE)。需指出的是,对接触分析中涉及的较复杂情况,采取在定义时应尽量使用自动接触的策略,从而尽量减少对接触方向人为的干预; 接着,将静摩擦系数(FS) 和动摩擦系数(FD ) 之值都设定为0.7; 此外,由于在生成路面时已经选择了FIXED 类型,即相对车身的速度为0,故无需再对路面的边界条件进行定义。最终成型模型为图17。

图17 最终成型
来源:华晨汽车工程研究院
作者:张博彬,赵春吉,汤洪澎