据报道,对激光探测和测距(LiDAR)系统、服务于自动驾驶汽车产业的零部件制造商来说,合并及收购活动极其疯狂,同时其他行业也加入LiDAR狂热大军。

丰田最新自动驾驶平台增加LiDAR
LiDAR系统使用脉冲激光照射目标区域,并测量反射信号返回接收器所需的时间。LiDAR系统一般包括:激光源或其它发射器、灵敏的光电探测器或其它接收器、同步和数据处理电子系统、运动控制设备或微机电系统(MEMS)扫描镜(二选一),均是基于精确的激光扫描组件并可用于创建3D地图或收集近距离数据。
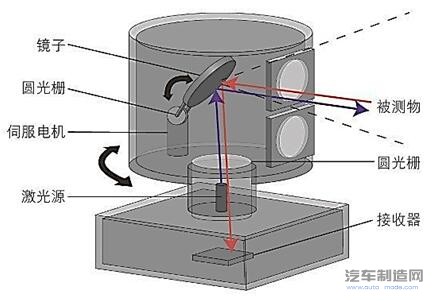
LiDAR系统简示图
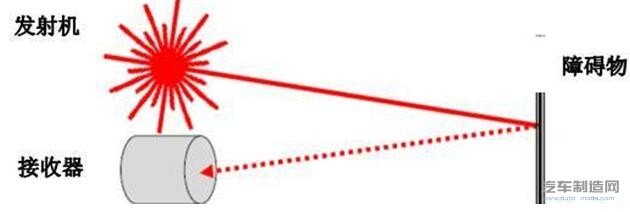
LiDAR工作原理图
据了解,在这些所需的组件中,激光本身就有助于提升整个系统的性能。比如,激光光束质量和发散角是负责LiDAR制图的横向(x轴和y轴)分辨率,而短脉冲持续时间和时间抖动则是负责纵向(z轴)的精度。再比如,脉冲能量是实现长程的关键参数,而高脉冲重复率则可提升扫描速度并提高数据吞吐量。
激光性能考量因素
高峰值功率(几十千瓦至几十兆瓦)脉冲(纳秒范围)的固态激光器已用于LiDAR数十年,尺寸、重量、成本、功耗、液体冷却、冲击与振动灵敏度,以及极端环境限制了LiDAR仪器在移动设备、空中和空间应用中的发展。但像意大利Bright Solutions这样的公司,近日开发出新一代高功率、亚纳秒、通过空气或热传导冷却的Q开关固态激光器。此类激光器可打破以往的限制,并提供从紫外线到近红外的多种激光波长。

Bright Solutions公司的固态激光器
对于机载地形测绘,通常使用波长约为1µm的激光光源,这种波长可使光波在保证用眼安全的前提下将投射范围扩展到足够大。而对于海洋测绘(即海底和沿海地区的高分辨率测绘),常使用一种高能量的、频率倍增的532 nm的激光光源,这是由于绿色光的波长是纯水的高透波率与潜艇微粒的有限反向散射之间最合适的折中。
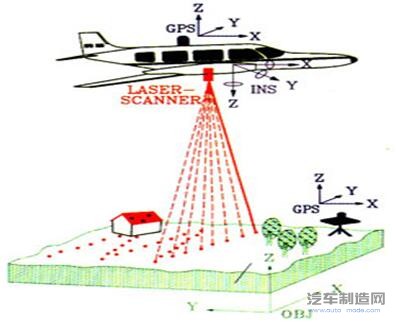
机载地形测绘示意图
如果单考虑成本和能耗,532 nm至1 µm的波长通常是有益的,但若要达到相对较远的距离,激光的强度就很容易超过1类激光安全极限。这种情况下,如果光波没有达到符合用眼安全的直径(从而增加系统尺寸),激光发射就会对人眼造成伤害。
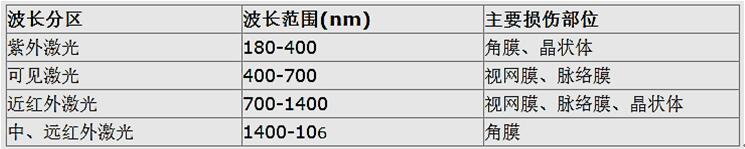
不同波长激光眼损伤部位
民用和商业应用中,保证用眼安全的激光器在高性能紧凑型LiDAR中越来越受欢迎。在用眼安全的波长范围内,当在地形测绘和避障中探测固体时,通常需要约红外激光器发射1.5 µm的波长。事实上,大气情况良好时,探测器在1.5 µm范围内是非常高效的。或者,约355 nm或更短的紫外线波长是保证用眼安全的大气LiDAR系统的最佳选择,因为大气微粒有相对较高的反向散射系数。
除了考虑波长,脉冲持续时间是否也很重要?理想情况下,LiDAR的设计者们希望达到毫米到厘米级的纵向测量分辨率,因此应该考虑短脉冲持续时间。即便如此,非常短的脉冲(约几皮秒)也会导致激光光谱和接收机带宽的扩大,从而使信噪比变差。另一方面,脉冲超过1纳秒,噪声减少,但分辨率也会降低。使脉冲持续时间达到约几百皮秒(或亚纳秒),这是高纵向精度和信噪比的最佳权衡方案。
这里我们详细介绍自动驾驶车辆LiDAR的激光选择。
自动驾驶车辆LiDAR
据ABI Research最近的一项调查显示,到2026年1月,汽车上的LiDAR设备数量将达到6900万部。正如Keopsys集团(拉尼翁,法国)的Frederic Chiquet、研发经理Guillaume Canat和首席执行官Marc le Flohic所解释的那样,现存两类主要的自动驾驶汽车LiDAR系统:3D Flash LiDAR和扫描式LiDAR。
Flash LiDAR使用的是广角发射源和广角光学系统(例如鱼眼镜头),将在单个发射过程中获得的反散射光集中于矩阵探测器上,以获得用于模拟车辆周围区域的所有飞行时间(ToF)数据。相反地,扫描式LiDAR可以逐行地处理3D环境;光在每个方向上依次发射,对应的回声由探测器逐个检测。符合用眼安全的激光源必须以脉冲模式工作,光束需强大到能够探测到100米外穿深色衣服的行人,工作温度为-40到85°C,并且可发射出测距精度达10厘米的脉冲。
许多LiDAR光源是基于激光二极管,也有非制冷光纤激光器,较激光二极管有诸多的优势,如拥有高功率光束分裂和使用光纤路由到多个传感器位置的能力。使用主振荡器功率放大器(MOPA)结构中,一种典型的1550 nm LiDAR的光纤激光器的脉冲重复率达到5~250 kHz,功率水平分别为10~15 kW和200~300 W。
脉冲激光二极管和光纤激光源用于自动驾驶汽车LiDAR的应用对比研究如下。
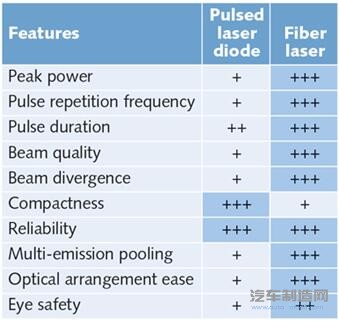
自动驾驶车辆LiDAR应用中脉冲激光二极管和光纤激光器来源的比较(来源:Keopsys集团)
专用于自动驾驶汽车的脉冲激光二极管是混合器件。激光芯片安装在由MOSFET晶体管触发的电容器中。每当晶体管的栅极开启时,电容器内积累的电荷就会被释放到芯片中,从而释放出光脉冲。尽管此类型光源的性价比不错,相比昂贵的1550nm InGaAs光电二极管,其905 nm的输出很容易被硅探测器检测到,但激光二极管具有有限的脉冲重复率和较低的峰值功率,并且受到过热效应的限制。
3D Flash LiDAR的激光二极管光源是基于二极管堆叠技术,用几个边缘发射器垂直封组装在一起,每层之间均由一层薄的散热片隔开防止内部过热。不幸的是,非相干堆叠增加会导致输出功率高,这样通常不能满足1类用眼安全的需求。尽管VCSEL是一种比叠加技术性价比更高的代替方案,但其较弱的输出功率将会限制在短程ToF的应用中。
来源:麦姆斯咨询