
简单分析机器人红外线检测系统在汽车车身焊接中的应用
2018-01-23 11:00:43· 来源:仪商
微信公众号

汽车焊接是汽车制造过程中的关键工序之一,具有很高的技术指标要求,因此必须对焊接质量进行认真检测。
汽车焊接是汽车制造过程中的关键工序之一,具有很高的技术指标要求,因此必须对焊接质量进行认真检测。
传统的检测方式通常是采用固定三坐标测量机,但这种方式操纵复杂,速度慢,周期长,只能对产品进行抽检。

机器人检测作为一种新型的检测手段,具有大量程、非接触、直观、快速及精度高等优点,因而可以应用于汽车车身的在线检测,及时反馈产品的误差信息,不仅提高了产品的合格率,同时也为工艺改进、减小误差提供了闭环反馈的尺寸控制手段,符合现代制造的质量工程要求。所以,在同悦轿车焊装自动化生产线上增加了机器人红外线检测系统的应用。
机器人在线检测系统构成
本测量系统由两台对角布置的KUKA机器人、视觉传感器、测量控制柜(内含测量计算机及图像处理系统,用户界面程序,服务器模块等)、PLC控制柜系统(安全门模块,光栅,RFID系统,Z向传感器)等部分构成。其中激光视觉测头是获取被测对象图像信息的直接器件。采用半导体激光器作为光源的测头,可以非接触、在线测量车身上棱边、定位孔的空间三维坐标或功能尺寸。其主要技术参数为:分辨率0.01mm,精度±0.05mm,测量时间0.5s,工作距离200mm,激光测头和传感器支架的总质量约为12kg。
应用案例
1.系统布置
在同悦自动化下线MB110工位车身两侧布置两台检测机器人。为了对车身内部的一些重要的特征点也可以进行测量,并兼顾车身前后关键功能点,经过机器人三维仿真模拟,并结合现场布局,确定检测工作站布局如图1所示。
2.测量点方案及模拟
(1)测量点数的计算 A车焊装自动化线的生产节拍为130s/台,滑橇输送时间20s,机器人单个特征点的检测时间约2.5s。按此计算,两机器人最多的测量点数为:(130-20)/2.5=88个点。
(2)测量点的选择、模拟与确认 整个焊装生产线共有四个关键的总成状态:侧围总成、发动机舱总成、地板总成及车身总成。我们只采用了一套在线检测系统,即白车身的在线检测系统,因此,测量的点数越多,在线监控的视野也就越广阔。在计算机仿真之前,以固定式三坐标测量点为基础,并根据测量点的重要性,经过计算机三维仿真模拟及现场调试,共确定了77个测量点。
3.检测的实现及可实现的功能
(1)检测过程 如图2所示,白车身在滑撬上运动到检测工作站停下并精确定位,线控制器给检测站控制器发“到位”信号→站控制器给机器人发“车型”及“启动”信号→机器人接到信号后开始工作,机器人在每个测量点向测量控制器发“测量请求”和“测点ID” 信号,等待测量控制器发回的“测量完成信号”→测量系统接到信号后开始测量并记录数据,然后传递到测量分析软件进行处理,测量结束后向机器人发“测量完成”信号→机器人收到“测量完成信号”后开始向下一测量点运动,至此完成全部待测点的测量。
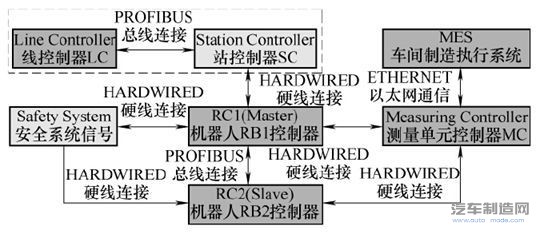
图 在线检测过程示意
(2)检测系统可实现的功能 具体有三种功能:
整车数据查询与分析。整车数据查询是按整个车身进行查询,反映整个车身的情况。整车数据查询既可以按照车身的生产时间进行查询,也可以按照车身的编号进行查询。查询数据的列表可以采用多种排序方式:车身编号和点号、点号和车身编号、生产时间及生产班次等。数据的显示采用三种不同的底色来反映测量点制造误差的大小。
功能尺寸分析。功能尺寸分析是对一个车身的多个点进行综合评价。可以选择一定时间段生产的车身进行功能尺寸评价,也可以选取一定的车身编号段内的车身进行功能尺寸评价。最后在评价表中会列出车身编号、生产时间以及各功能尺寸,表中数据的显示可以按照选定的功能尺寸项进行排序,也可以选择图示显示。
统计功能。对整个生产线产品质量的检测数据统计可以分为月统计和年统计:对于每月逐日的产品进行数据统计,可以选择统计条件,如需要统计的月份、分歧格数目等。图表显示的形式可以是合格率也可以是日产量;年统计数目是根据月统计数目进行统计的,所以每个月的数据进行统计后,就会出现在年统计表格中。
4.测量影响因素及注意事项
在测量过程中,反复验证,总结影响测量精度的主要因素有以下四个方面:
(1)传感器采集图片时的姿态 垂直于检测特征面时精度最高,随着倾斜角的增大,测量精度随着降低。
(2)温度的影响 环境温度的影响可以忽略,但机器人本体运行过程中温度的变化对测量的数值影响较大,温度变化主要在检测特征面的法线方向上产生偏差(垂直测量时)。在极限条件下,对精度最大影响约为0.2mm。通常情况下,温度影响不大。
(3)测量特征的影响 测量特征越明显,测量的精度越高,例如棱线上测量点的测量精度要比口边线上的测量精度高,平面孔的测量精度比螺母孔的测量精度高。
(4)机器人本身的重复性定位精度越高,测量的精度就越高。

5.实际效果
在A车焊装自动化线下线工位MB110工位增加的在线检测系统,对下线白车身的关键尺寸进行实时监测,经验证明有以下效果:测量速度快、精度高,实现了在线产品的100%检测。当检测数据与基准数据出现小批量偏差时,控制站会自动报警,工作人员可及时发现问题。根据监测的趋势图表分析,现场工程师可大概判定问题产生的原因,为解决问题指引了方向,压缩了问题产生原因的范围,缩短了解决问题的时间。
通过该系统可以及时发现问题,降低了白车身的返修率及报废率。安装此测量系统至今,未出现产品批量返修及报废现象。
总结
目前,基于工业机器人的视觉检测技术已经成为国外大公司研究的热点,而且,各大汽车生产厂家也都把工业机器人柔性视觉检测定为今后在线检测的应用趋势。目前,工业机器人视觉检测技术已经实现了汽车白车身的在线柔性检测、挡风玻璃的自动安装、轿车车门的自动安装、激光焊缝的检测等,并成功应用于BMW、DaimlerChrysler、GM等国际著名汽车生产厂家,在自主品牌汽车生产厂家也正逐步应用。
传统的检测方式通常是采用固定三坐标测量机,但这种方式操纵复杂,速度慢,周期长,只能对产品进行抽检。
机器人检测作为一种新型的检测手段,具有大量程、非接触、直观、快速及精度高等优点,因而可以应用于汽车车身的在线检测,及时反馈产品的误差信息,不仅提高了产品的合格率,同时也为工艺改进、减小误差提供了闭环反馈的尺寸控制手段,符合现代制造的质量工程要求。所以,在同悦轿车焊装自动化生产线上增加了机器人红外线检测系统的应用。
机器人在线检测系统构成
本测量系统由两台对角布置的KUKA机器人、视觉传感器、测量控制柜(内含测量计算机及图像处理系统,用户界面程序,服务器模块等)、PLC控制柜系统(安全门模块,光栅,RFID系统,Z向传感器)等部分构成。其中激光视觉测头是获取被测对象图像信息的直接器件。采用半导体激光器作为光源的测头,可以非接触、在线测量车身上棱边、定位孔的空间三维坐标或功能尺寸。其主要技术参数为:分辨率0.01mm,精度±0.05mm,测量时间0.5s,工作距离200mm,激光测头和传感器支架的总质量约为12kg。
应用案例
1.系统布置
在同悦自动化下线MB110工位车身两侧布置两台检测机器人。为了对车身内部的一些重要的特征点也可以进行测量,并兼顾车身前后关键功能点,经过机器人三维仿真模拟,并结合现场布局,确定检测工作站布局如图1所示。
2.测量点方案及模拟
(1)测量点数的计算 A车焊装自动化线的生产节拍为130s/台,滑橇输送时间20s,机器人单个特征点的检测时间约2.5s。按此计算,两机器人最多的测量点数为:(130-20)/2.5=88个点。
(2)测量点的选择、模拟与确认 整个焊装生产线共有四个关键的总成状态:侧围总成、发动机舱总成、地板总成及车身总成。我们只采用了一套在线检测系统,即白车身的在线检测系统,因此,测量的点数越多,在线监控的视野也就越广阔。在计算机仿真之前,以固定式三坐标测量点为基础,并根据测量点的重要性,经过计算机三维仿真模拟及现场调试,共确定了77个测量点。
3.检测的实现及可实现的功能
(1)检测过程 如图2所示,白车身在滑撬上运动到检测工作站停下并精确定位,线控制器给检测站控制器发“到位”信号→站控制器给机器人发“车型”及“启动”信号→机器人接到信号后开始工作,机器人在每个测量点向测量控制器发“测量请求”和“测点ID” 信号,等待测量控制器发回的“测量完成信号”→测量系统接到信号后开始测量并记录数据,然后传递到测量分析软件进行处理,测量结束后向机器人发“测量完成”信号→机器人收到“测量完成信号”后开始向下一测量点运动,至此完成全部待测点的测量。
图 在线检测过程示意
(2)检测系统可实现的功能 具体有三种功能:
整车数据查询与分析。整车数据查询是按整个车身进行查询,反映整个车身的情况。整车数据查询既可以按照车身的生产时间进行查询,也可以按照车身的编号进行查询。查询数据的列表可以采用多种排序方式:车身编号和点号、点号和车身编号、生产时间及生产班次等。数据的显示采用三种不同的底色来反映测量点制造误差的大小。
功能尺寸分析。功能尺寸分析是对一个车身的多个点进行综合评价。可以选择一定时间段生产的车身进行功能尺寸评价,也可以选取一定的车身编号段内的车身进行功能尺寸评价。最后在评价表中会列出车身编号、生产时间以及各功能尺寸,表中数据的显示可以按照选定的功能尺寸项进行排序,也可以选择图示显示。
统计功能。对整个生产线产品质量的检测数据统计可以分为月统计和年统计:对于每月逐日的产品进行数据统计,可以选择统计条件,如需要统计的月份、分歧格数目等。图表显示的形式可以是合格率也可以是日产量;年统计数目是根据月统计数目进行统计的,所以每个月的数据进行统计后,就会出现在年统计表格中。
4.测量影响因素及注意事项
在测量过程中,反复验证,总结影响测量精度的主要因素有以下四个方面:
(1)传感器采集图片时的姿态 垂直于检测特征面时精度最高,随着倾斜角的增大,测量精度随着降低。
(2)温度的影响 环境温度的影响可以忽略,但机器人本体运行过程中温度的变化对测量的数值影响较大,温度变化主要在检测特征面的法线方向上产生偏差(垂直测量时)。在极限条件下,对精度最大影响约为0.2mm。通常情况下,温度影响不大。
(3)测量特征的影响 测量特征越明显,测量的精度越高,例如棱线上测量点的测量精度要比口边线上的测量精度高,平面孔的测量精度比螺母孔的测量精度高。
(4)机器人本身的重复性定位精度越高,测量的精度就越高。
5.实际效果
在A车焊装自动化线下线工位MB110工位增加的在线检测系统,对下线白车身的关键尺寸进行实时监测,经验证明有以下效果:测量速度快、精度高,实现了在线产品的100%检测。当检测数据与基准数据出现小批量偏差时,控制站会自动报警,工作人员可及时发现问题。根据监测的趋势图表分析,现场工程师可大概判定问题产生的原因,为解决问题指引了方向,压缩了问题产生原因的范围,缩短了解决问题的时间。
通过该系统可以及时发现问题,降低了白车身的返修率及报废率。安装此测量系统至今,未出现产品批量返修及报废现象。
总结
目前,基于工业机器人的视觉检测技术已经成为国外大公司研究的热点,而且,各大汽车生产厂家也都把工业机器人柔性视觉检测定为今后在线检测的应用趋势。目前,工业机器人视觉检测技术已经实现了汽车白车身的在线柔性检测、挡风玻璃的自动安装、轿车车门的自动安装、激光焊缝的检测等,并成功应用于BMW、DaimlerChrysler、GM等国际著名汽车生产厂家,在自主品牌汽车生产厂家也正逐步应用。



编辑推荐





最新资讯
-
华为、地平线、大众、东风、起亚等引
2025-04-24 08:27
-
全球产业链聚沪 共探双碳新路径 SNEC
2025-04-18 18:05
-
柯马签订具有约束力的协议收购 Autom
2025-04-17 13:01
-
高效协同新范式:比亚迪叉车领创智能
2025-04-17 10:04
-
埃马克德国总部迎来中国社科院工业经
2025-04-15 09:40