
融合多重汽车环境感知能力,ADAS打造安全驾驶环境
2018-08-13 14:44:36· 来源:牛喀网
微信公众号

先进驾驶辅助系统(ADAS)系结合影像感测、雷达、信号处理及网络通讯等方案,为汽车增添危险情境判断能力,并提供驾驶人实用的辅助或警示功能,甚至让汽车主动对障碍物做出煞车与闪避动作,有助将人为驾驶疏失减至最低程度,提高行车安全。
先进驾驶辅助系统(ADAS)系结合影像感测、雷达、信号处理及网络通讯等方案,为汽车增添危险情境判断能力,并提供驾驶人实用的辅助或警示功能,甚至让汽车主动对障碍物做出煞车与闪避动作,有助将人为驾驶疏失减至最低程度,提高行车安全。
试想当汽车行驶在郊区公路上,忽然有人或动物从路边跑出来时,一般状况下驾驶已来不及放掉油门并把脚移往煞车踏板紧急煞车,但是车子却自己及时煞住而免掉一场致命的车祸。这种具有高度智慧的汽车已开始进到人们的日常生活中。
汽车电子技术在过去30年里不断加速演进,各类车型的动力及操控性能也在这段期间内得到大幅的提升。一些先进的安全控制系统如防死锁煞车系统(ABS)和电子车身稳定系统(ESC)等也陆续被导入。同时,随着各种车辆四周环境感测系统的演进,先进驾驶辅助系统(ADAS)也开始快速抢进汽车产业。
根据内政部统计,2013年造成人员伤亡之道路交通事故(A1及A2类)共计二十七万三千四百四十九件;其中A1类交通事故肇事原因,以驾驶人未注意车前状态占20.4%名列第一,驾驶人未依规定让车占12.9%次之,酒醉(后)驾驶失控占12.5%居第三。这三类肇事原因均可归类为人为疏失,足见如果车辆能在行车途中遇有危险状况时,适时对驾驶提醒或直接介入以避免车祸发生,将可大量减少因车祸导致的人员伤亡。
降低人为疏失风险自动煞车技术受瞩目
ADAS依据对驾驶的实际影响可区分为两大类:安全警示系统与主动安全系统。简单地说,安全警示系统指的是非介入式安全辅助,利用影像显示、灯号或警示音等方式,让驾驶可以确实掌握汽车周围环境,进而协助驾驶避免事故的发生。主动安全系统则是依据汽车周围环境信息,在需要时介入行车操控功能,进一步保障乘客与行人的安全。
安全警示系统
安全警示系统系利用摄影机、雷达(Radar)、激光雷达(LiDAR)、超音波侦测等方式(图1),将汽车周围的信息以多种不同接口有效地提供给驾驶。以图像处理为例,驾驶辅助系统可将倒车影像或全景影像利用车内的显示器呈现。
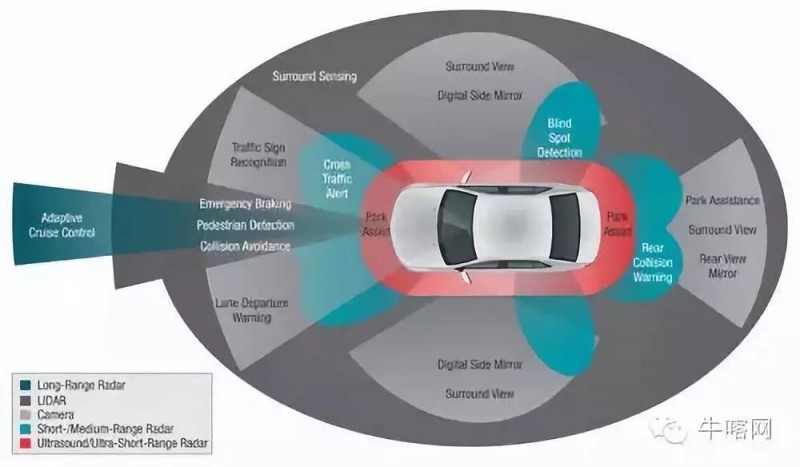
图1 汽车周围环境感测装置
图像处理的进一步应用则是影像辨识,现有技术可对行车周遭的物体如车辆、行人、障碍物与各种交通号志进行辨识,当有安全疑虑时,系统可藉灯号或警示音提醒驾驶采取必要的防范措施。这一类系统可由下列几项应用作为代表:车道偏移警示系统(Lane Departure Warning System, LDWS),当车辆太靠近车道线时发出警示音,提醒驾驶将车子拉回车道中央;前方碰撞警示(Front Collision Warning, FCW),当与前车距离小于容易发生碰撞的门坎值时,系统发出警示音提醒驾驶与前车保持安全距离;盲点侦测(Blind SpotDetection, BSD),一般后视镜都有驾驶看不到的盲区,BSD系统可协助驾驶侦测进入后视镜盲区的车辆,进而在变换车道前提醒驾驶是否有潜在的危险。
主动安全系统
前述辅助系统都只是将汽车周围状况提供给驾驶或启动警示装置,并没有真正介入汽车操控。驾驶辅助的下一个层次,则是藉由电控系统直接协助或修正驾驶对车子的操控。车辆安全电控系统依照动的属性又可分为主动安全及被动安全两类,主动安全指的是防范碰撞事故发生所进行的电控系统,而被动安全是指碰撞已无法避免时或碰撞发生后,以减低伤亡为目的而设计的安全功能。
主动安全系统中最广为人知的莫过于ABS,该系统在预见因煞车过重或摩擦力不足将使车轮产生死锁打滑时,适时调整煞车压力以避免车轮因死锁而失去煞车力。另一种日渐普遍的主动安全系统为ESC,该系统在天雨路滑或高速转弯时,可藉由各车轮的单独煞车以避免转弯不足或过度转弯(图2)。
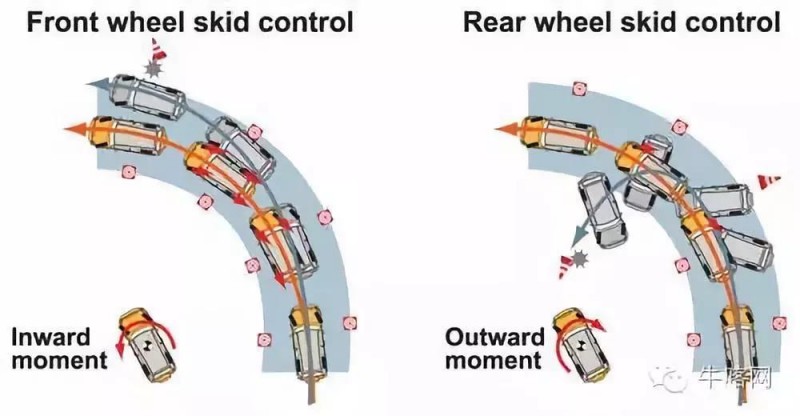
图2 ESC系统操作原理
ESC技术应用于中心较高的休旅车时还能协助避免车辆翻覆,及防侧翻(Roll-OverMitigation, ROM)。其他常见的系统如车道保持辅助(Lane Keeping Assist, LKA)及自适应巡航控制(ACC)。LKA在车辆有偏离车道倾向而靠近车道线时,系统会自动将车辆往车道中间范围调整;ACC则是在传统的自动巡航上,加上与前车保持安全距离的功能。
从2011年起,欧盟开始准备将主动安全加入新车安全评估系统(New Car Assessment Programme, NCAP)。过去Euro NCAP仅就各种碰撞的乘客安全(也就是被动安全)进行一至五颗星的评比,从2014年起,各项主动安全的功能将逐渐加入评比。在主动安全功能中,除了前述的FCW、ESC及ACC等功能外,最关键的技术就是自动紧急煞车(Autonomous Emergency Braking, AEB)。
AEB是指在车辆行驶途中,有时因驾驶的分心,有时可能是如打瞌睡等状况使驾驶暂时失去操控能力,或者是小孩从路边冲出等突发状况时,系统会主动在事故发生前将车辆紧急煞住,以确保人车的安全。
AEB的评分分为三个项目进行,即AEB City、AEB Inter-Urban和AEB Pedestrian三种状况,分别代表城市里的低速行驶、郊区的高速行驶及行人保护机制;总积分将用三个分数以不同的权重加乘,同时在各个星等的判别都有总分及各分项得分的最低门坎。
实现主动安全效能传感器可靠度成关键
主动安全功能的有效与否及可靠度,须仰赖汽车配备之传感器是否能提供可信赖的完整信息。在上述传感器中,摄影机对物体判别如车辆、行人或交通号志等辨识具有较好的效果,但天候影响也相对明显;雷达的侦测距离较佳,天候影响也较小,但在物体区分及对静止物体之判断能力较差,价格也相对高;激光雷达大约介于两者之间,但价格也随可靠度提高而急速攀升;超音波雷达则以近距离侦测为主。简单地说,各种传感器的基本技术与使用限制,即是光学、电磁波及声波的技术与限制。
因为各类传感器都有其限制,良好的环境感测系统须具备两种以上之传感器,再以传感器融合 (Sensor Fusion)技术做出最佳的判断;如此一方面可以补足单一传感器的限制,另一方面也可藉由共同感测到的对象相互比对,而提高对侦测结果的信心。因主动安全为高度安全攸关(Safety Critical)的系统,传感器的可靠度是没有妥协空间的。
有了良好的感测系统后,主动安全系统最关键的技术,就属高度智能化的车辆动态控制技术了。在设计车辆动态控制系统前,控制工程团队须对车辆的煞车、悬吊、动力、转向等系统特性能充分了解,并对各种制动器的特性与效能充分掌握,方能着手进行控制系统的设计。
由于汽车行驶的路面与环境有极大的差异性,各种主动安全系统必须能在不同天候及环境下发挥功能,因此系统的强健性(Robustness)非常关键;同时,也因为操作环境的复杂性,繁复的系统调校及大量的测试验证,都将是系统设计开发过程中无法避免的。
目前众多的主动安全技术中,除了ESC及LKA能做到转向控制之外,其余系统都是以车行方向(纵向)的应用为主,主要原因在于一方面电动辅助转向系统(Electrical Power Steering, EPS)在普及化上仍有许多成长空间;另一方面,侧向行驶辅助功能将巨幅提升整体控制系统的感测及逻辑复杂度,系统稳定性及可靠度会面临更大的挑战。
但是,随着各种控制系统相关组件技术的不断进步,侧向控制的应用将会快速成长。一个典型的应用就是车道变换辅助系统,在高速公路上变换车道经常容易发生事故,如果汽车能确实掌握四方车辆位置及相对速度,自动车道变换技术将指日可待。另一个应用则是自动停车系统,现在市面上已开始贩卖具备自动停车系统的新车,以后路边停车或倒车入库将更为容易。
其他类别的驾驶辅助技术也在快速地发展,例如交通号志辨识(Traffic Sign Recognition, TSR),利用摄影机画面的影像辨识,系统能解读各种路边的交通号志,及时提醒驾驶;智能型限速辅助(Intelligent Speed Assist, ISA),依据速限的辨识,系统可提供驾驶超速警告甚至主动将车速设限;导航实时路况信息,可实时将到达目的地前的各种路况提供给驾驶参考,或者协助及时变换路径。
拓展汽车感测范围DSRC加速车联网建构
随着无线通信技术的快速发展,未来汽车将会形成一个联网生态。目前汽车网络较成熟的技术除了3G或长程演进计划(LTE)等远程通信外,短距通讯技术如专用短距离通讯(Dedicated Short Range Communication, DSRC)技术已开始受到欧美等国家之重视,它的普及可让汽车对汽车(Vehicle to Vehicle, V2V)及汽车对基础设施(Vehicle to Infrastructure, V2I)变为可能;藉由车对车及车对固定装置间的局部链接,许多在驾驶视力范围以外的附近交通信息,将可在第一时间内互相交换,对行车安全及节能减碳都能带来实质的效益。
美国高速公路安全局(National Highway Traffic Safety Administration, NHTSA)于2012?2013年在密执安州安那堡市进行了为期半年以上的试运行,由密歇根大学主导,各车厂及相关科研单位协办,于该城市内约三千辆汽车加装DSRC装置,以收集该系统对整体交通安全与节能的效益。其结论证明DSRC具有显著的成效,并计划在未来两年内决定是否通过立法强制所有的车辆加装此设备。
技术/法规逐步到位智慧车迈向自动驾驶
当各种行车辅助与控制技术都能确实掌握时,下一级段挑战就是自动驾驶的汽车了。目前已有许多车厂及研究团队积极发展自动驾驶技术,但距离技术成熟并能商品化仍有很长的时间。
目前最积极的团队莫过于Google Driverless Car,该车利用64激光束组成的激光雷达,加上摄影机、雷达、全球卫星定位系统(GPS)和超音波雷达等装置,侦测四周环境及其他移动物体,并经过复杂的感测融合技术以达到最基本自动驾驶之目的(图3)。Google汽车的配置在市售车款上并不适合,而且成本也不实际;更重要的,一旦发生事故,责任的厘清绝不单纯,连带会影响顾客的接受度。

图3 Google自动驾驶车
基于各方对自动驾驶的定义差异甚大,NHTSA于是将自动驾驶技术依自动化的层次区分为五级,让相关的技术讨论能有共识而不会产生误解。第零级即传统的汽车,完全没有介入式的驾驶辅助系统;第一级自动化可有一种以上的介入式辅助系统,但各系统均为独立运作;第二级自动化具有两种以上的控制系统共同运作,容许部分时间将部分操控交给控制系统操作,但驾驶仍须全时监视行车状态,并随时能将主控权完全接手;第三级自动化驾驶可适时将全车操控交由控制系统处理,但当系统遇有无法操作的情况时,系统会留充裕的时间通知驾驶接管;而第四级才是完全自动驾驶,只要有目的地信息,车辆会自行开到目的地。
有了清楚的定义后,相关法规才能规范在什么时间、哪种技术成熟了,再准许相关功能的自动驾驶车辆上路,而且驾驶的责任也可以清楚地定义,因为任何差错都可能带来无法预期的灾害,责任归属必须非常明确。
依上述定义来看,所谓自动驾驶车辆较可行的目标应是在第三级,或许再5?10年可以开始看到该类的商品出售。然而,在技术演进的过程中,基础建设的投资,车厂与协力厂的积极投入,甚至法规的及时调整都是不可或缺的关键因素。
全面掌握路况信息ADAS增进驾驶安全
现今各种先进技术已快速且大量地运用在汽车上,以进一步提升舒适性、方便性及各种操控性能,但再怎么先进的功能都不能凌驾于最基本的行车安全之上。ADAS利用各种先进的电子及电控技术,一方面让驾驶对汽车的操控有更进一步地掌握,同时也让各种路况的驾驶更加安全。
每一种主动安全技术的实现,都象征着人类生命财产多了一层保障,这同时也代表着社会成本的进一步低减,因此全球都已把ADAS相关之技术发展列为最高优先的投资与补助项目之一。希望国内各界也能跟上这一波浪潮,将相关技术与产品不断地向上提升,让国人能进一步享受高科技所带来的保障。
试想当汽车行驶在郊区公路上,忽然有人或动物从路边跑出来时,一般状况下驾驶已来不及放掉油门并把脚移往煞车踏板紧急煞车,但是车子却自己及时煞住而免掉一场致命的车祸。这种具有高度智慧的汽车已开始进到人们的日常生活中。
汽车电子技术在过去30年里不断加速演进,各类车型的动力及操控性能也在这段期间内得到大幅的提升。一些先进的安全控制系统如防死锁煞车系统(ABS)和电子车身稳定系统(ESC)等也陆续被导入。同时,随着各种车辆四周环境感测系统的演进,先进驾驶辅助系统(ADAS)也开始快速抢进汽车产业。
根据内政部统计,2013年造成人员伤亡之道路交通事故(A1及A2类)共计二十七万三千四百四十九件;其中A1类交通事故肇事原因,以驾驶人未注意车前状态占20.4%名列第一,驾驶人未依规定让车占12.9%次之,酒醉(后)驾驶失控占12.5%居第三。这三类肇事原因均可归类为人为疏失,足见如果车辆能在行车途中遇有危险状况时,适时对驾驶提醒或直接介入以避免车祸发生,将可大量减少因车祸导致的人员伤亡。
降低人为疏失风险自动煞车技术受瞩目
ADAS依据对驾驶的实际影响可区分为两大类:安全警示系统与主动安全系统。简单地说,安全警示系统指的是非介入式安全辅助,利用影像显示、灯号或警示音等方式,让驾驶可以确实掌握汽车周围环境,进而协助驾驶避免事故的发生。主动安全系统则是依据汽车周围环境信息,在需要时介入行车操控功能,进一步保障乘客与行人的安全。
安全警示系统
安全警示系统系利用摄影机、雷达(Radar)、激光雷达(LiDAR)、超音波侦测等方式(图1),将汽车周围的信息以多种不同接口有效地提供给驾驶。以图像处理为例,驾驶辅助系统可将倒车影像或全景影像利用车内的显示器呈现。
图1 汽车周围环境感测装置
图像处理的进一步应用则是影像辨识,现有技术可对行车周遭的物体如车辆、行人、障碍物与各种交通号志进行辨识,当有安全疑虑时,系统可藉灯号或警示音提醒驾驶采取必要的防范措施。这一类系统可由下列几项应用作为代表:车道偏移警示系统(Lane Departure Warning System, LDWS),当车辆太靠近车道线时发出警示音,提醒驾驶将车子拉回车道中央;前方碰撞警示(Front Collision Warning, FCW),当与前车距离小于容易发生碰撞的门坎值时,系统发出警示音提醒驾驶与前车保持安全距离;盲点侦测(Blind SpotDetection, BSD),一般后视镜都有驾驶看不到的盲区,BSD系统可协助驾驶侦测进入后视镜盲区的车辆,进而在变换车道前提醒驾驶是否有潜在的危险。
主动安全系统
前述辅助系统都只是将汽车周围状况提供给驾驶或启动警示装置,并没有真正介入汽车操控。驾驶辅助的下一个层次,则是藉由电控系统直接协助或修正驾驶对车子的操控。车辆安全电控系统依照动的属性又可分为主动安全及被动安全两类,主动安全指的是防范碰撞事故发生所进行的电控系统,而被动安全是指碰撞已无法避免时或碰撞发生后,以减低伤亡为目的而设计的安全功能。
主动安全系统中最广为人知的莫过于ABS,该系统在预见因煞车过重或摩擦力不足将使车轮产生死锁打滑时,适时调整煞车压力以避免车轮因死锁而失去煞车力。另一种日渐普遍的主动安全系统为ESC,该系统在天雨路滑或高速转弯时,可藉由各车轮的单独煞车以避免转弯不足或过度转弯(图2)。
图2 ESC系统操作原理
ESC技术应用于中心较高的休旅车时还能协助避免车辆翻覆,及防侧翻(Roll-OverMitigation, ROM)。其他常见的系统如车道保持辅助(Lane Keeping Assist, LKA)及自适应巡航控制(ACC)。LKA在车辆有偏离车道倾向而靠近车道线时,系统会自动将车辆往车道中间范围调整;ACC则是在传统的自动巡航上,加上与前车保持安全距离的功能。
从2011年起,欧盟开始准备将主动安全加入新车安全评估系统(New Car Assessment Programme, NCAP)。过去Euro NCAP仅就各种碰撞的乘客安全(也就是被动安全)进行一至五颗星的评比,从2014年起,各项主动安全的功能将逐渐加入评比。在主动安全功能中,除了前述的FCW、ESC及ACC等功能外,最关键的技术就是自动紧急煞车(Autonomous Emergency Braking, AEB)。
AEB是指在车辆行驶途中,有时因驾驶的分心,有时可能是如打瞌睡等状况使驾驶暂时失去操控能力,或者是小孩从路边冲出等突发状况时,系统会主动在事故发生前将车辆紧急煞住,以确保人车的安全。
AEB的评分分为三个项目进行,即AEB City、AEB Inter-Urban和AEB Pedestrian三种状况,分别代表城市里的低速行驶、郊区的高速行驶及行人保护机制;总积分将用三个分数以不同的权重加乘,同时在各个星等的判别都有总分及各分项得分的最低门坎。
实现主动安全效能传感器可靠度成关键
主动安全功能的有效与否及可靠度,须仰赖汽车配备之传感器是否能提供可信赖的完整信息。在上述传感器中,摄影机对物体判别如车辆、行人或交通号志等辨识具有较好的效果,但天候影响也相对明显;雷达的侦测距离较佳,天候影响也较小,但在物体区分及对静止物体之判断能力较差,价格也相对高;激光雷达大约介于两者之间,但价格也随可靠度提高而急速攀升;超音波雷达则以近距离侦测为主。简单地说,各种传感器的基本技术与使用限制,即是光学、电磁波及声波的技术与限制。
因为各类传感器都有其限制,良好的环境感测系统须具备两种以上之传感器,再以传感器融合 (Sensor Fusion)技术做出最佳的判断;如此一方面可以补足单一传感器的限制,另一方面也可藉由共同感测到的对象相互比对,而提高对侦测结果的信心。因主动安全为高度安全攸关(Safety Critical)的系统,传感器的可靠度是没有妥协空间的。
有了良好的感测系统后,主动安全系统最关键的技术,就属高度智能化的车辆动态控制技术了。在设计车辆动态控制系统前,控制工程团队须对车辆的煞车、悬吊、动力、转向等系统特性能充分了解,并对各种制动器的特性与效能充分掌握,方能着手进行控制系统的设计。
由于汽车行驶的路面与环境有极大的差异性,各种主动安全系统必须能在不同天候及环境下发挥功能,因此系统的强健性(Robustness)非常关键;同时,也因为操作环境的复杂性,繁复的系统调校及大量的测试验证,都将是系统设计开发过程中无法避免的。
目前众多的主动安全技术中,除了ESC及LKA能做到转向控制之外,其余系统都是以车行方向(纵向)的应用为主,主要原因在于一方面电动辅助转向系统(Electrical Power Steering, EPS)在普及化上仍有许多成长空间;另一方面,侧向行驶辅助功能将巨幅提升整体控制系统的感测及逻辑复杂度,系统稳定性及可靠度会面临更大的挑战。
但是,随着各种控制系统相关组件技术的不断进步,侧向控制的应用将会快速成长。一个典型的应用就是车道变换辅助系统,在高速公路上变换车道经常容易发生事故,如果汽车能确实掌握四方车辆位置及相对速度,自动车道变换技术将指日可待。另一个应用则是自动停车系统,现在市面上已开始贩卖具备自动停车系统的新车,以后路边停车或倒车入库将更为容易。
其他类别的驾驶辅助技术也在快速地发展,例如交通号志辨识(Traffic Sign Recognition, TSR),利用摄影机画面的影像辨识,系统能解读各种路边的交通号志,及时提醒驾驶;智能型限速辅助(Intelligent Speed Assist, ISA),依据速限的辨识,系统可提供驾驶超速警告甚至主动将车速设限;导航实时路况信息,可实时将到达目的地前的各种路况提供给驾驶参考,或者协助及时变换路径。
拓展汽车感测范围DSRC加速车联网建构
随着无线通信技术的快速发展,未来汽车将会形成一个联网生态。目前汽车网络较成熟的技术除了3G或长程演进计划(LTE)等远程通信外,短距通讯技术如专用短距离通讯(Dedicated Short Range Communication, DSRC)技术已开始受到欧美等国家之重视,它的普及可让汽车对汽车(Vehicle to Vehicle, V2V)及汽车对基础设施(Vehicle to Infrastructure, V2I)变为可能;藉由车对车及车对固定装置间的局部链接,许多在驾驶视力范围以外的附近交通信息,将可在第一时间内互相交换,对行车安全及节能减碳都能带来实质的效益。
美国高速公路安全局(National Highway Traffic Safety Administration, NHTSA)于2012?2013年在密执安州安那堡市进行了为期半年以上的试运行,由密歇根大学主导,各车厂及相关科研单位协办,于该城市内约三千辆汽车加装DSRC装置,以收集该系统对整体交通安全与节能的效益。其结论证明DSRC具有显著的成效,并计划在未来两年内决定是否通过立法强制所有的车辆加装此设备。
技术/法规逐步到位智慧车迈向自动驾驶
当各种行车辅助与控制技术都能确实掌握时,下一级段挑战就是自动驾驶的汽车了。目前已有许多车厂及研究团队积极发展自动驾驶技术,但距离技术成熟并能商品化仍有很长的时间。
目前最积极的团队莫过于Google Driverless Car,该车利用64激光束组成的激光雷达,加上摄影机、雷达、全球卫星定位系统(GPS)和超音波雷达等装置,侦测四周环境及其他移动物体,并经过复杂的感测融合技术以达到最基本自动驾驶之目的(图3)。Google汽车的配置在市售车款上并不适合,而且成本也不实际;更重要的,一旦发生事故,责任的厘清绝不单纯,连带会影响顾客的接受度。
图3 Google自动驾驶车
基于各方对自动驾驶的定义差异甚大,NHTSA于是将自动驾驶技术依自动化的层次区分为五级,让相关的技术讨论能有共识而不会产生误解。第零级即传统的汽车,完全没有介入式的驾驶辅助系统;第一级自动化可有一种以上的介入式辅助系统,但各系统均为独立运作;第二级自动化具有两种以上的控制系统共同运作,容许部分时间将部分操控交给控制系统操作,但驾驶仍须全时监视行车状态,并随时能将主控权完全接手;第三级自动化驾驶可适时将全车操控交由控制系统处理,但当系统遇有无法操作的情况时,系统会留充裕的时间通知驾驶接管;而第四级才是完全自动驾驶,只要有目的地信息,车辆会自行开到目的地。
有了清楚的定义后,相关法规才能规范在什么时间、哪种技术成熟了,再准许相关功能的自动驾驶车辆上路,而且驾驶的责任也可以清楚地定义,因为任何差错都可能带来无法预期的灾害,责任归属必须非常明确。
依上述定义来看,所谓自动驾驶车辆较可行的目标应是在第三级,或许再5?10年可以开始看到该类的商品出售。然而,在技术演进的过程中,基础建设的投资,车厂与协力厂的积极投入,甚至法规的及时调整都是不可或缺的关键因素。
全面掌握路况信息ADAS增进驾驶安全
现今各种先进技术已快速且大量地运用在汽车上,以进一步提升舒适性、方便性及各种操控性能,但再怎么先进的功能都不能凌驾于最基本的行车安全之上。ADAS利用各种先进的电子及电控技术,一方面让驾驶对汽车的操控有更进一步地掌握,同时也让各种路况的驾驶更加安全。
每一种主动安全技术的实现,都象征着人类生命财产多了一层保障,这同时也代表着社会成本的进一步低减,因此全球都已把ADAS相关之技术发展列为最高优先的投资与补助项目之一。希望国内各界也能跟上这一波浪潮,将相关技术与产品不断地向上提升,让国人能进一步享受高科技所带来的保障。


编辑推荐





最新资讯
-
比亚迪叉车的智慧演变:从动力革新到
2025-04-02 09:15
-
重磅剧透!首批参展商名单曝光——这
2025-04-01 20:48
-
施耐德电气发布新一代Harmony XVB7模
2025-04-01 18:51
-
[转载] 机床巨头埃马克:百年跌宕再
2025-03-31 12:42
-
从4S店到修理厂:FLIR ONE Pro USB-C
2025-03-28 16:05