
浅谈涂装喷涂机器人工艺调试过程
2019-02-21 09:27:07· 来源:长城汽车股份有限公司 作者:孟凡彬,赵成林,陈登阁
微信公众号

0 引言近些年来,随着汽车行业的迅速发展,喷涂机器人在汽车涂装方面发挥着越来越重要的作用,不仅大大的提高了喷涂作业效率,同时也提升了汽车涂装外观品质。喷涂机器人调试成为汽车面涂重要工作的之一,新车型新颜色的面涂调试过程质量
0 引言
近些年来,随着汽车行业的迅速发展,喷涂机器人在汽车涂装方面发挥着越来越重要的作用,不仅大大的提高了喷涂作业效率,同时也提升了汽车涂装外观品质。喷涂机器人调试成为汽车面涂重要工作的之一,新车型新颜色的面涂调试过程质量直接影响着涂装品质及调试周期。本文主要从新颜色同车型和新颜色新车型两个方面进行讨论如何开展面涂颜色调试工作,下面以面涂杜尔喷漆机器人为例进行简述。
1 新颜色老车型调试
同车型新增颜色时,可完全在杜尔公司提供EcoScreen 3D-OnSite软件中完成相关的操作。一般情况下,新增颜色时,机器人原有喷涂轨迹保持不变,复制已有成熟颜色的喷涂参数:一般选择固体份、膜厚等涂料性质相近的颜色,然后更改颜色配置表、清洗程序配置表,可空车模拟一遍新颜色试喷涂,确认有无异常问题。然后实车过线调试漆膜膜厚,逐步提升和改善漆膜外观质量。清洗程序配置表因程序内容借用原有颜色,后期在调试过程中需特别注意,不同颜色清洗时间及清洗频次一般无较大差异,但不排除因换新颜色机器人雾化器清洗不净带来的颗粒、异色等漆膜弊病。
1.1 复制喷涂参数
选择可以借鉴的现有颜色,作为新颜色喷涂初版参数。初版参数选择的好坏,直接影响实车调试周期,一般选择涂料性质相近的颜色,见表1所列。

在EcoScreen 3D-OnSite中复制同车型颜色时操作如下:在工作站中选择新增颜色车型,打开Brush editor刷子表,依次选择Copy,Color group→Color group,Selection中选择新颜色组编号,点击进入目标颜色组中,点击Copy完参数复制。也可在后台文件中操作完成,在brushes\projectglobal\ini路径下,选择需要复制的brushtab,粘贴在上级车型文件中即可。一般不建议这么做,一旦操作失误的话,容易引起一些其他隐患问题。
1.2 更改颜色配置表
新颜色参数配置完成后,需保证新颜色与油漆管路保持一致,否则只是单纯的复制喷涂参数。
在EcoScreen 3D-OnSite中选择Paint assignment用户界面(如图1),选择需更改的站号、机器人,确定新颜色Color code,然后更改针阀Valve no.数值,保证针阀与管路对应。这里需格外注意,Flashcard中每一个机器人都需更改,而且保持一致,这样一站内各机器人喷涂的颜色才能一致。涉及外板喷涂时,还需注意外板机器人一二站喷涂,需要更改ColorDel_Colum数值,一般情况下数值7代表一站喷涂,数值11271代表2站喷涂(因机器人不同代表的定义不同)
1.3 更改清洗程序配置表
新颜色清洗程序配置多数情况下和原有颜色保持不变,可平移复制。但需在后续的实车喷涂调试过程中,调查并验证是否存在因清洗程序配置不当导致的雾化器清洗不净的现象,在换色时或短清洗后,漆膜表面存在异色、颗粒、溶剂印等问题。
2 新颜色新车型调试
对于新车型以及变款车型的喷漆工作调试,通常复制其他相似车型喷涂轨迹,然后离线模式下,逐点在EcoScreen 3D-OnSite中修改喷涂仿形图,然后离线模拟轨迹动作,实车在线示教对喷涂轨迹进行微调,在外板示教过程中测量旋杯至车身表面的垂直距离(150mm-200mm),保持旋杯喷涂方向与车身平面始终垂直。同时观察机器人各喷涂动作是否协调合理,无大幅度动作晃动,可调整局部位置喷涂顺序,使机器人动作连贯优美。通过复制其他车型喷涂参数,或参考其他车型喷涂参数填写新车型刷子表,将所有刷子号喷涂参数填写完整,设置颜色配置表和清洗程序配置表。第一遍模拟建议空车带料进行,确认有无问题,再实车模拟。离线及模拟是车型调试过程最重要的一步,同时也是不可或缺的一部分,许多潜在问题的发生就是在模拟的过程中发现的。
2.1 喷涂仿形的复制
新车型调试相比于上述新增颜色调试,多了一道新车型喷涂仿形,需要EcoScreen 3D-OnSite中复制相似车型,具体操作如下:在工作站内复制相似车型喷涂轨迹粘贴至各机器人下,重新命名,并在global文件中添加新车型车身坐标原点信息。
2.2 离线仿形轨迹调整
因是全新车型,需要对复制的喷涂轨迹进行离线调整。在加载车身数模后,对每一个轨迹点进行核对调整,包括轨迹点距车身数模距离及轨迹间距,切换刷子号时间点,开关枪点位置设置合理性等。根据经验,调整的重点位置集中在外板R角边沿处,外板腰线处、内板棱线、台阶面、凸台等结构复杂的部位,门把手下沿、翼子板前沿、侧围后沿等位置需单独设置刷子号,另外翼子板与前门分缝、前门与后门分缝部位,建议单独设置轨迹及刷子号,以应对肥边问题。加油口盖(见图1)最好设置两道喷涂轨迹,2个以上的刷子号,可解决痱子、流漆等漆膜弊病。
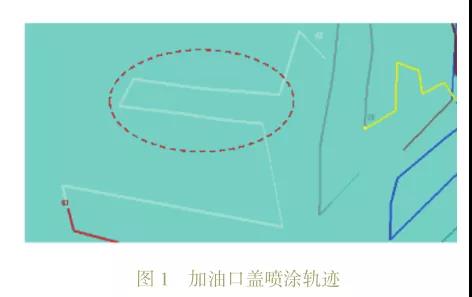
杜尔机器人外板喷涂扇幅一般为450 mm,轨迹间距为150 mm(重叠率设定为2/3),旋杯至车身表面距离是200 mm,外板喷涂作业速度依据现场节拍及作业室体要求在500~800 mm/s。
2.3 更改车型定义表
在Body assignment界面中,添加新车型定义名、对应的Project以及必要的备注信息,更改完成后,在Flashcard中检查每个机器人对应下定义表是否全部更改,防止同步时遗漏。通常情况下,各机器人间会同步自动更改。
2.4 模拟
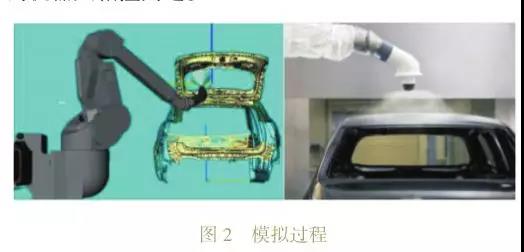
模拟过程分为离线模拟和在线模拟(见图2),在线模拟又可分为带料及空车模拟。杜尔的EcoScreen 3DOnSite可将喷漆对象(车身、产品架等)和机器人工具(雾化装置)的三维立体图加载至图形窗口中进行离线编程及离线模拟。在离线模拟环境中设置链速后,可分析、检查、查看机器人实时地喷涂运动轨迹及喷涂动作,开关枪点、喷涂参数切换时的变化。不同于内板喷涂模拟,外板喷涂作业时,可同时操作多个机器人进行模拟以提高效率。同时在模拟过程中,可采用多观察角度,或者通过旋转视角进行查看,检查机器人在运动过程中可能存在的问题。离线模拟环境同在线模拟相比,可提供一些模拟过程中的问题报警信息,例如各机器人在喷涂过程中是否超过机器人运动极限,stop conveyor位置距离设置是否合理,同时可有效避免在线模拟过程中存在的机器人相撞问题。
离线模拟无问题后,将开展在线带料空车模拟,在实际喷涂作业环境中查看各机器人喷涂情况,根据调试过程中的报警信息,例如机器人运动极限、刷子号缺失、刷子号在开枪之前设置、无有效车型信息等。强烈建议,在实车带料模拟前,一定要实车在线示教确认机器人动作与车身无碰撞问题。之后进行实车带料喷涂,确认喷涂效果,开展调整漆膜膜厚工作。
2.5 其他信息的添加
喷涂参数、颜色配置及清漆程序配置等信息的添加类似新颜色调试过程,在这不再赘述。新车型调试仍需考虑线体入口处超声波车型识别(与AVI机运信息连锁,相互比对,实现车型识别),设定鸵鸟毛站鸵鸟毛程序(提高车身清洁度并避免干涉)、离子风程序及新车型代码,并保证面涂室体车型连续批量自动过车。
3 结语
在车型颜色调试过程中,尤其是涉及到内板机器人仿形更改,如开门机器人开门角度问题,需注意在开门过程中保证机器人受力在内部传感器的接受范围内,机器人喷涂及过度动作是否协调。同时根据清洗溶剂和颜色特性,合理设定换色、清洗及人工擦净时间。在调试完成后,将关注解决在现场生产爬坡及上量过程中的问题,并开展量产阶段漆膜品质提升、降低成本等相关工作。本文进行的研究是在特定机器人的情况下开展涂装面漆工艺的调试,调试思路和方案可供同行业技术人员进行共享交流参考使用。
近些年来,随着汽车行业的迅速发展,喷涂机器人在汽车涂装方面发挥着越来越重要的作用,不仅大大的提高了喷涂作业效率,同时也提升了汽车涂装外观品质。喷涂机器人调试成为汽车面涂重要工作的之一,新车型新颜色的面涂调试过程质量直接影响着涂装品质及调试周期。本文主要从新颜色同车型和新颜色新车型两个方面进行讨论如何开展面涂颜色调试工作,下面以面涂杜尔喷漆机器人为例进行简述。
1 新颜色老车型调试
同车型新增颜色时,可完全在杜尔公司提供EcoScreen 3D-OnSite软件中完成相关的操作。一般情况下,新增颜色时,机器人原有喷涂轨迹保持不变,复制已有成熟颜色的喷涂参数:一般选择固体份、膜厚等涂料性质相近的颜色,然后更改颜色配置表、清洗程序配置表,可空车模拟一遍新颜色试喷涂,确认有无异常问题。然后实车过线调试漆膜膜厚,逐步提升和改善漆膜外观质量。清洗程序配置表因程序内容借用原有颜色,后期在调试过程中需特别注意,不同颜色清洗时间及清洗频次一般无较大差异,但不排除因换新颜色机器人雾化器清洗不净带来的颗粒、异色等漆膜弊病。
1.1 复制喷涂参数
选择可以借鉴的现有颜色,作为新颜色喷涂初版参数。初版参数选择的好坏,直接影响实车调试周期,一般选择涂料性质相近的颜色,见表1所列。
在EcoScreen 3D-OnSite中复制同车型颜色时操作如下:在工作站中选择新增颜色车型,打开Brush editor刷子表,依次选择Copy,Color group→Color group,Selection中选择新颜色组编号,点击进入目标颜色组中,点击Copy完参数复制。也可在后台文件中操作完成,在brushes\projectglobal\ini路径下,选择需要复制的brushtab,粘贴在上级车型文件中即可。一般不建议这么做,一旦操作失误的话,容易引起一些其他隐患问题。
1.2 更改颜色配置表
新颜色参数配置完成后,需保证新颜色与油漆管路保持一致,否则只是单纯的复制喷涂参数。
在EcoScreen 3D-OnSite中选择Paint assignment用户界面(如图1),选择需更改的站号、机器人,确定新颜色Color code,然后更改针阀Valve no.数值,保证针阀与管路对应。这里需格外注意,Flashcard中每一个机器人都需更改,而且保持一致,这样一站内各机器人喷涂的颜色才能一致。涉及外板喷涂时,还需注意外板机器人一二站喷涂,需要更改ColorDel_Colum数值,一般情况下数值7代表一站喷涂,数值11271代表2站喷涂(因机器人不同代表的定义不同)
1.3 更改清洗程序配置表
新颜色清洗程序配置多数情况下和原有颜色保持不变,可平移复制。但需在后续的实车喷涂调试过程中,调查并验证是否存在因清洗程序配置不当导致的雾化器清洗不净的现象,在换色时或短清洗后,漆膜表面存在异色、颗粒、溶剂印等问题。
2 新颜色新车型调试
对于新车型以及变款车型的喷漆工作调试,通常复制其他相似车型喷涂轨迹,然后离线模式下,逐点在EcoScreen 3D-OnSite中修改喷涂仿形图,然后离线模拟轨迹动作,实车在线示教对喷涂轨迹进行微调,在外板示教过程中测量旋杯至车身表面的垂直距离(150mm-200mm),保持旋杯喷涂方向与车身平面始终垂直。同时观察机器人各喷涂动作是否协调合理,无大幅度动作晃动,可调整局部位置喷涂顺序,使机器人动作连贯优美。通过复制其他车型喷涂参数,或参考其他车型喷涂参数填写新车型刷子表,将所有刷子号喷涂参数填写完整,设置颜色配置表和清洗程序配置表。第一遍模拟建议空车带料进行,确认有无问题,再实车模拟。离线及模拟是车型调试过程最重要的一步,同时也是不可或缺的一部分,许多潜在问题的发生就是在模拟的过程中发现的。
2.1 喷涂仿形的复制
新车型调试相比于上述新增颜色调试,多了一道新车型喷涂仿形,需要EcoScreen 3D-OnSite中复制相似车型,具体操作如下:在工作站内复制相似车型喷涂轨迹粘贴至各机器人下,重新命名,并在global文件中添加新车型车身坐标原点信息。
2.2 离线仿形轨迹调整
因是全新车型,需要对复制的喷涂轨迹进行离线调整。在加载车身数模后,对每一个轨迹点进行核对调整,包括轨迹点距车身数模距离及轨迹间距,切换刷子号时间点,开关枪点位置设置合理性等。根据经验,调整的重点位置集中在外板R角边沿处,外板腰线处、内板棱线、台阶面、凸台等结构复杂的部位,门把手下沿、翼子板前沿、侧围后沿等位置需单独设置刷子号,另外翼子板与前门分缝、前门与后门分缝部位,建议单独设置轨迹及刷子号,以应对肥边问题。加油口盖(见图1)最好设置两道喷涂轨迹,2个以上的刷子号,可解决痱子、流漆等漆膜弊病。
杜尔机器人外板喷涂扇幅一般为450 mm,轨迹间距为150 mm(重叠率设定为2/3),旋杯至车身表面距离是200 mm,外板喷涂作业速度依据现场节拍及作业室体要求在500~800 mm/s。
2.3 更改车型定义表
在Body assignment界面中,添加新车型定义名、对应的Project以及必要的备注信息,更改完成后,在Flashcard中检查每个机器人对应下定义表是否全部更改,防止同步时遗漏。通常情况下,各机器人间会同步自动更改。
2.4 模拟
模拟过程分为离线模拟和在线模拟(见图2),在线模拟又可分为带料及空车模拟。杜尔的EcoScreen 3DOnSite可将喷漆对象(车身、产品架等)和机器人工具(雾化装置)的三维立体图加载至图形窗口中进行离线编程及离线模拟。在离线模拟环境中设置链速后,可分析、检查、查看机器人实时地喷涂运动轨迹及喷涂动作,开关枪点、喷涂参数切换时的变化。不同于内板喷涂模拟,外板喷涂作业时,可同时操作多个机器人进行模拟以提高效率。同时在模拟过程中,可采用多观察角度,或者通过旋转视角进行查看,检查机器人在运动过程中可能存在的问题。离线模拟环境同在线模拟相比,可提供一些模拟过程中的问题报警信息,例如各机器人在喷涂过程中是否超过机器人运动极限,stop conveyor位置距离设置是否合理,同时可有效避免在线模拟过程中存在的机器人相撞问题。
离线模拟无问题后,将开展在线带料空车模拟,在实际喷涂作业环境中查看各机器人喷涂情况,根据调试过程中的报警信息,例如机器人运动极限、刷子号缺失、刷子号在开枪之前设置、无有效车型信息等。强烈建议,在实车带料模拟前,一定要实车在线示教确认机器人动作与车身无碰撞问题。之后进行实车带料喷涂,确认喷涂效果,开展调整漆膜膜厚工作。
2.5 其他信息的添加
喷涂参数、颜色配置及清漆程序配置等信息的添加类似新颜色调试过程,在这不再赘述。新车型调试仍需考虑线体入口处超声波车型识别(与AVI机运信息连锁,相互比对,实现车型识别),设定鸵鸟毛站鸵鸟毛程序(提高车身清洁度并避免干涉)、离子风程序及新车型代码,并保证面涂室体车型连续批量自动过车。
3 结语
在车型颜色调试过程中,尤其是涉及到内板机器人仿形更改,如开门机器人开门角度问题,需注意在开门过程中保证机器人受力在内部传感器的接受范围内,机器人喷涂及过度动作是否协调。同时根据清洗溶剂和颜色特性,合理设定换色、清洗及人工擦净时间。在调试完成后,将关注解决在现场生产爬坡及上量过程中的问题,并开展量产阶段漆膜品质提升、降低成本等相关工作。本文进行的研究是在特定机器人的情况下开展涂装面漆工艺的调试,调试思路和方案可供同行业技术人员进行共享交流参考使用。
举报 0
收藏 0
分享 113
-
杜尔中国海外项目-Stellantis 集团摩洛哥盖尼特
2025-03-20 -

杜尔为比亚迪欧洲首家工厂提供可持续喷涂设备
2025-01-14 -

绿色足迹 未来启航 | 杜尔中国如何为可持续发展
2024-12-13 -

杜尔为Stellantis集团建造节能涂装车间,可实现
2024-11-22
编辑推荐





最新资讯
-
比亚迪叉车的智慧演变:从动力革新到
2025-04-02 09:15
-
重磅剧透!首批参展商名单曝光——这
2025-04-01 20:48
-
施耐德电气发布新一代Harmony XVB7模
2025-04-01 18:51
-
[转载] 机床巨头埃马克:百年跌宕再
2025-03-31 12:42
-
从4S店到修理厂:FLIR ONE Pro USB-C
2025-03-28 16:05