
汽车电子趋势:系统设计的新约束
微信公众号

在当前汽车电子领域,一股潮流正在形成。
汽车行业的发展受到两大关键驱动因素的影响:对跨平台软件开发的一体化视图需求以及对硬件开发成本的限制。
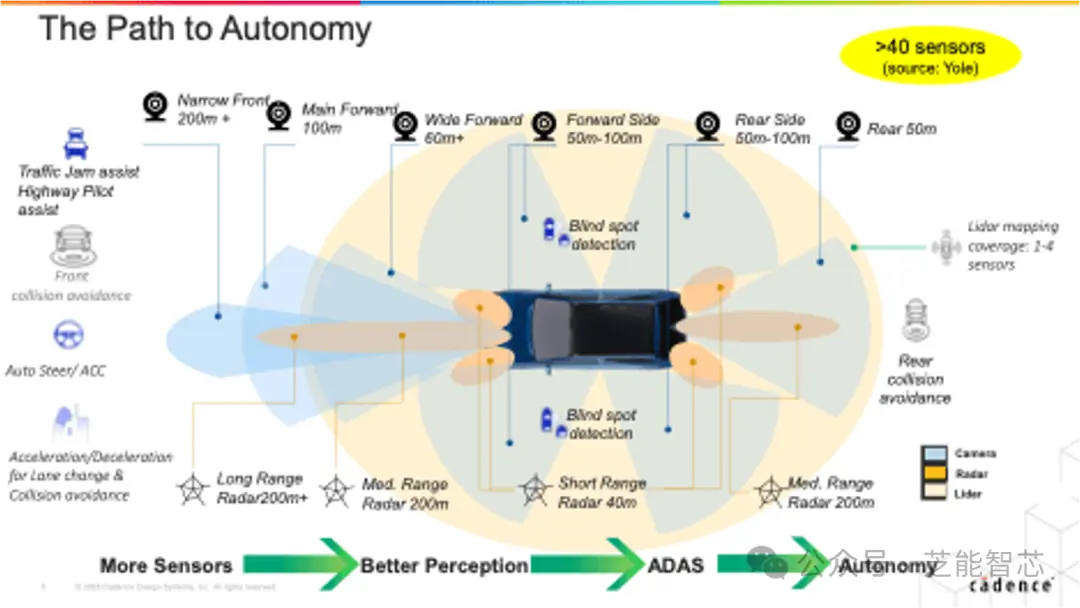
汽车内部的智能化触及方方面面。从智能倒车摄像头到后视镜,都具备物体识别功能,能够检测车辆后方的儿童或宠物。驾驶舱内的驾驶员监控系统能够感知驾驶员注意力的分散,并在必要时采取行动。而占用监控系统则可检测是否有儿童被遗留在车内,这些系统通常结合使用视频和雷达监控技术。
管理智能化需求
软件复杂性与成本
在车辆外部感知方面,前向视频结合物体检测已经成为常规安全功能,用于感知碰撞风险和保持车辆在车道内行驶。
这些功能现在正与4D成像雷达相结合,为视频感知提供更丰富、天气不敏感的补充。视频加4DR将为自适应巡航控制等新功能提供支持,这对于智能驾驶的发展至关重要。
汽车企业(OEM)和一级供应商(Tier1)仍然致力于将所有这些功能集成到软件中,以通过驾驶舱屏幕和其他控制器进行管理。为了实现易于管理的集成,需要一个统一的软件定义跨所有这些分布式功能。
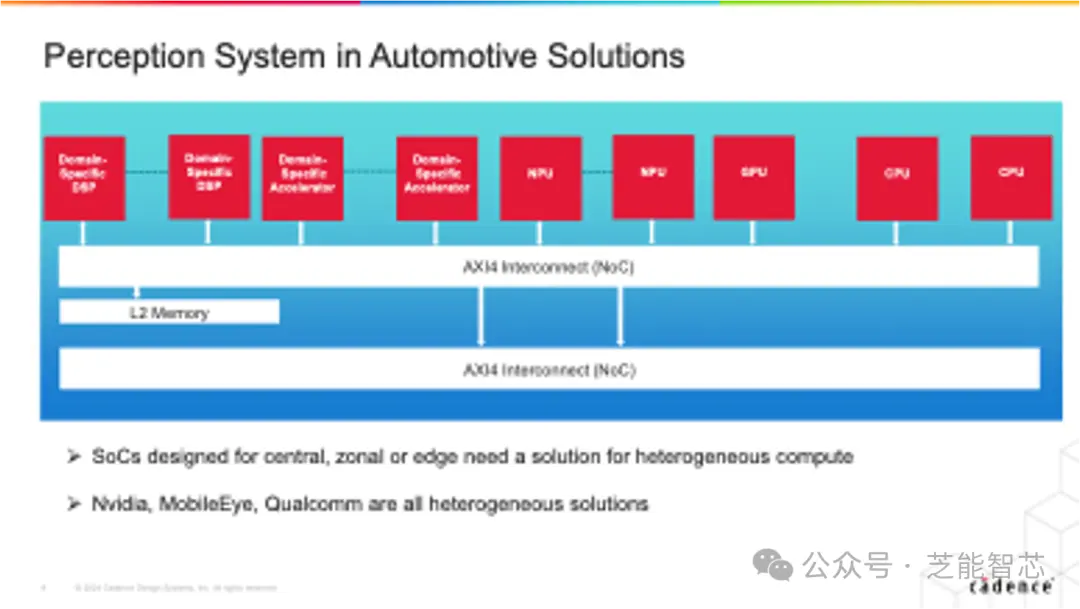
在硬件方面,尽管人工智能供应商在这方面投入了大量讨论,但单靠人工智能部件还远远不足以满足车企的需求。需要信号处理用于对象识别、处理4D点云的专用加速器以及高效且成本低廉的推理处理能力,同时还需要包括CPU集群、内存管理和通信等其他计算功能。
这些功能需要在单一封装解决方案中集成,以降低成本并提供性能和低功耗,这离不开最先进的半导体工艺的支持。
车企都在推动着共同的差异化平台架构,旨在实现汽车周围的、跨车型系列的和未来的托管分布式计算。车企还在降低成本,使汽车价格能够符合消费者的预期。
跟进潮流
● 以视觉+雷达应用为例,系统首先使用摄像头进行图像捕捉,然后进行一系列复杂的图像信号处理功能,最后进行人工智能操作。雷达从天线开始,然后经过复杂的信号处理链生成4D雷达点云,最终进行基于人工智能的识别。
● 以Cadence的Tensilica Vision 331和Vision 341 DSP为例,支持计算机视觉和雷达成像的信号处理,以及入门级人工智能和传感器融合。这些内核提供了改进的功率、性能和面积,同时通过指令集优化提供了雷达增强模式,可实现高达6倍的性能提升。添加可选的Vision 4DR加速器后,性能进一步提升4倍。这种增强使得汽车OEM可以减少芯片种类,同时支持可扩展性。
对于车企的软件开发人员来说,如果几乎每个芯片都是其通用平台芯片的实例,那么软件的问题基本上就得到了解决。底层IP应共享通用的、基于标准的API,例如用于DSP和GPU的OpenCL,用于连接MATLAB的Simulink,以及常用的AI模型接口(如ONNX、TensorFlow和PyTorch)。整个Tensilica IP系列及其NeuroWeave软件编译器工具链所支持的功能,可从标准训练网络映射到目标设备。
汽车企业可以从亚马逊AWS的Graviton平台的成功中汲取灵感,该平台目前已广泛应用于数据中心,并专注于下一代创新。虽然汽车领域的异构架构平台在某些方面会有所不同,但通用平台的长期价值并没有太大不同。
小结
汽车电子变化趋势给系统设计带来新的约束条件。通过对软件和硬件的综合考虑,车企正在努力实现更智能、更安全和更经济的车辆,将为未来的汽车技术发展带来更多创新,并将为驾驶体验带来新的变革。
- 下一篇:均胜电子智能驾驶技术助力未来出行
- 上一篇:汽车底盘模块化装配工艺分析
-

乘势而上,北汽极狐2025将继续极速前行
2025-01-26 -

北汽蓝谷稳健前行,蓄势新一轮高质量发展
2025-01-26 -

问界M7被鉴定存在“刹车失灵”和“人为修改数据
2024-11-07 -
大众中国计划裁员!
2024-09-24
编辑推荐





最新资讯
-
全球产业链聚沪 共探双碳新路径 SNEC
2025-04-18 18:05
-
柯马签订具有约束力的协议收购 Autom
2025-04-17 13:01
-
高效协同新范式:比亚迪叉车领创智能
2025-04-17 10:04
-
埃马克德国总部迎来中国社科院工业经
2025-04-15 09:40
-
埃马克这项全新应用即将在CIMT惊艳首
2025-04-15 09:37