
IIHS正面及侧面碰撞测试假人、座椅定位通用程序
2017-03-19 22:59:56·
微信公众号

规程解读非一朝一夕,也非浏览几次就能融汇贯通,总是反反复复的蹂躏,越熟悉越觉得有那么些如鲠在喉,也不能解答的问题,真是希望有那么个公众号能化解我心中的种种疑惑。IIHS测试假人和座椅定位通用程序(完整修订版)人体测量装置(ATD)定位程序由密西根大学交通研究学院(UMTRI)提供,用于IIHS正面和侧面碰撞时座椅及
IIHS测试假人和座椅定位通用程序(完整修订版)
人体测量装置(ATD)定位程序由密西根大学交通研究学院(UMTRI)提供,用于IIHS正面和侧面碰撞时座椅及假人定位。

在IIHS碰撞试验时,定位假人的H点是需要通过计算得到的,为此IIHS专门做了一个EXCEL模板,只要把测量的数值输入模板,就能自动计算H点和H点的轨迹。EXCEL进入的界面后可以选择假人、车型、座椅调节类型等内容。
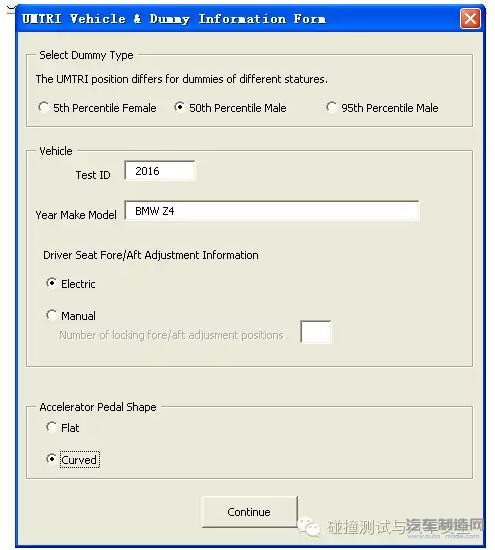
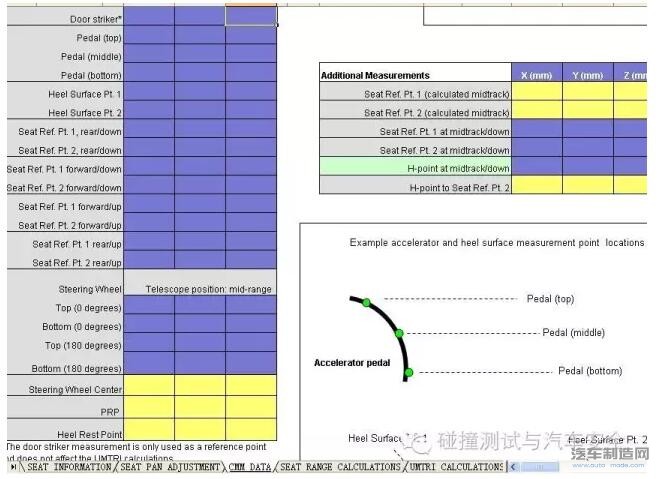
输入车型等试验参数后显示点击Continue进入以下界面, 按程序使用三坐标测量仪测量座椅的标记点后输入到CMM DATA表格中,表格将自动计算定位所需H点坐标。
具体定位程序如下:
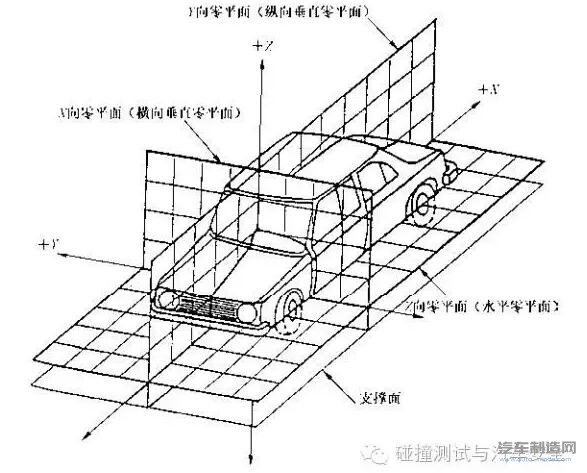
一、坐标定义
车辆从前往后方向定义为X正方向,竖直向上定义为Z的正方形,地面定义为XY平面,车辆空载时在车顶与车辆中心面交线上测量两个点来定义X轴,Y方向满足右手定则,如图:
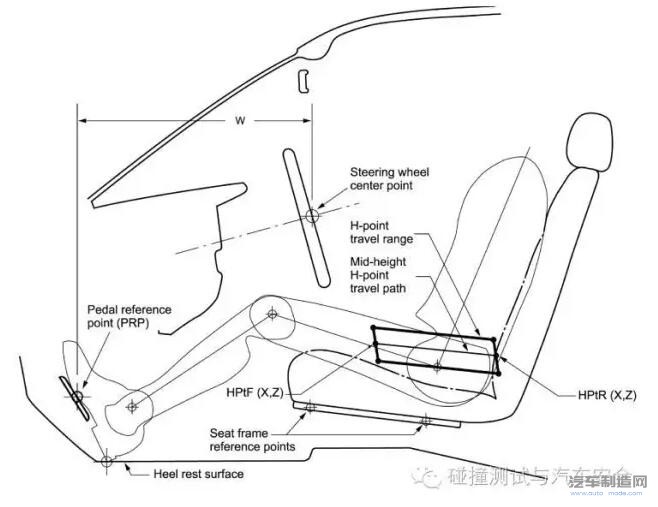
二、建立油门踏板参考点
油门踏板参考点是一个在油门踏板上用于计算H点的参考点,简称PRP(pedal reference point)。参考点PRP位于油门踏板轮廓中心线上,且从地毯上的足跟点开始沿与踏板轮廓相切的线往上200mm处,见下图,
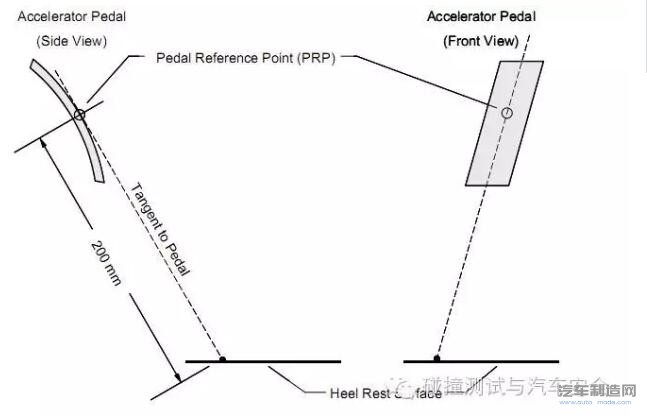
足跟点定义是H点测量装置(ATD)脚放在踏板上时,足跟的位置。简单的讲就是踏板切线与地板的交点。
在寻找这个点时,需要做以下步骤:
a、如果脚踏板是可以前后调节的,那么应该把脚踏板调节到最前位置。
b、用标记画出脚踏板的纵向中心线。
c、测量该中心线的上中下三个点,输入到“计算Excel”目模板中。
d、在地板上测量两个点输入“计算Excel”中,(这两个点需在油门踏板的后方,即坐标系的X正方向,且距离不得小于50mm)
e、表格自动计算参考点的位置。
三、建立方向盘中心点
a、 调节方向盘的倾角到中间位置,如果中间位置不能锁止,调节到中间靠下的最近锁止位置;
b、 转向柱可以伸缩时:
<1>如果是针对05百分位假人,转向柱调节到最前位置;
<2>如果针对50百分位和95百分位假人的话,调节到前后中间位置;
c、在方向盘顶部和底部分别测量点,然后旋转180度再次测量这两个点;
d、 通过以上测量点构造方向盘中心。

四、定义座椅行程范围
a、 座椅行程的定义仅仅限于座椅的前后和上下调节,如果座椅的坐垫是可以独立调节的,参考坐垫调节方法,不记入座椅行程范围;
b、先将座椅调节到最前位置;
c、 座椅上定义两个点,一个在坐盆前部的骨架上,另外一个在坐盆骨架的后部,两个点要能随着座椅调节而移动,两个点的运动与坐垫是相互独立的,最好选择螺栓的头部或特征明显的点为参考点;
d、 座椅调节到最下、最后位置,测量两个参考点的坐标;

e、再将座椅移动座椅到最前位置,测量两个参考点;
f、调节座椅到最高位置,测量两个参考点,奇葩的座椅会出现调节到最前位置的座椅升到最高时又能继续前调,此时把座椅调到可能的最前位置;
g、 调节座椅到最后位置,测量两个参考点;
h、 把以上测量点输入“计算Excel”中。
五、座椅定位
a、首先将座椅前后调节到中间位置,如果中间位置不能锁止,座椅后移至最近的锁止位置;
b、如果座椅高度可以调节,将座椅调节到最低位置;
c、 如果坐垫可以独立于座椅骨架进行前后调节,那么把坐垫调节到最后位置;
d、如果坐盆可以独立于座椅靠背进行上下调节,那么:
<1>如果存在坐盆和靠背能一起上下调节,那么调节坐盆到最低位置;
<2>如果坐盆仅仅能做倾角调节(前端上下运动),则将坐盆倾角调节到最低位置;
<3>如果坐盆和靠背不能一起上下调节,那么先将坐垫调节到中间位置;
<4>将座盆调节到最低位置,在坐垫前边缘(座椅中心线处)标记测量一个参考点1,在参考点1往后400mm位置标记测量参考点2;
<5>对于单调节机构,将坐盆调节到最高位置记录参考点2,然后将参考点为调节到上下中间位置;
<6>对于多调节机构,首先计算”4“中测量的两个参考点与水平线的夹角q,然后将参考点2调节到中间位置,最后将参考点1调节到与在中间位置的参考点2形成的角度与”计算的夹角q“相同的位置,如果调不到,就调到最近q角位置。
<7>做完以上调节后以后的座椅调节程序中,独立坐盆将不再做任何调节,只允许做坐盆与靠背同步移动的调节;记录以上数据采用三坐标测量仪。

e、采用SAEJ826所描述的3D-H装置测量座椅H点,大腿和小腿分别调节到50百分位(418mm)和10百分位(408mm);
f、座椅靠背分段可调,则将上部分调节到中间位置;
g、腰托调节到收起位置;
h、调节座椅靠背角到23度或厂家设计值;
i、使用三坐标测量仪测量H点和以上“四”中的“c”定义的两个参考点;把测量的坐标值输入“计算Excel”中,表格不报错为止,表格会根据油门踏板参考点、方向盘中心及以上测量的座椅相关点自动计算出试验位置座椅H点和该位置的参考点1、参考点2的坐标。
六、确认座椅最终试验位置
a、将座椅参考点2调节到表格计算出来的位置,如果座椅前后是独立调节的,应该将参考点1和参考点2都放到计算出来的位置±2mm,如果不能实现,则调整两个点到最接近计算值位置;
b、 用三坐标测量仪记录参考点1和参考点2的实际位置;

七、假人定位
a、将假人放到座椅上,使得假人中心面与座椅中心面重合(目视);
b、如果是长条座椅,将假人中心面与方向盘中心面重合(目视);
c、对于05女性假人,首先将小腿与大腿的夹角调节到120度,如果腿肚子与坐垫干涉,那么前移假人,然后往后推假人,让假人的盆骨与座椅靠背接触或推到假人小腿肚与坐垫接触为止;
d、对于50和95百分位假人,将假人的腿尽可能往前伸然后自由落下,然后将假人移动到H点与表格计算的目标值一致;
e、调节假人的大腿与坐垫接触;
f、对于05女性假人,将两膝盖中心线调节到距离160mm,大腿和小腿位于竖直平面内;
.jpg)
g、对于50和95百分位假人,将两膝盖金属外缘之间的距离调节到270mm,大腿和小腿位于竖直平面内;
h、如果油门踏板可调节,调到最前位置;
i、假人右脚放在未踏下的油门踏板上,足跟位于脚踏板切线与地板交接处;如果够不到,那么将脚尽可能往踏板方向伸调节到与小腿成90度角,脚跟着地板;如果脚掌不能接触踏板,可以调节脚与小腿的角度直到脚趾接触踏板,但两者的角度不得低于90度;
j、将假人左脚伸到最前放在歇脚板上,如果不能与歇脚板接触或有30mm的脚掌悬在前面,或没有外物支撑不能停留在歇脚上,那么前后调节脚直到不存在这三种情况,如果调节不了或没有歇脚板,那么将脚放在最外侧的搁脚区,如果此时出现不能伸到搁脚区或与离合、刹车干涉或f、g规定的距离满足不了,那么把脚尽可能往前放的在地板上,并保证腿在竖直平面内,规定距离也要满足;
k、保持大腿不动,推假人背部与座椅靠背接触,使得假人骨盆角达到最大;
l、保持大腿不动,调节假人H点与头部质心形成的角度到12±1度,如果不能满足,调节座椅靠背,直到满足;

m、左右摇晃假人在±5度范围内,减少假人与座椅的摩擦力;
n、如果此时右脚不能与油门踏板接触,那么每次调节座椅往前一个齿或10mm,只到至少20mm的脚底与踏板接触;
o、如果脚跟不能与地板接触,那么每次5mm的调节高调,直到脚跟与地板接触,如果座椅上下调节是前后独立的,那么调节时不得改变坐垫角度,如果调节到最低还是不能接触,以最低位置为试验位置;
p、测量假人骨盆角,应该满足05假人20 ±2.5度,50和95假人22.5±2.5度;如果该角度不能满足,调节假人H点与头部质心形成的角度在12±1度范围内,如果还不能满足,那么不再做调整;
q、调整假人横向水平角达到 ±0.5度,如果达不到,那么调到最接近为止;
r、如果骨盆角度、头顶角度与假人H点与头部质心形成的角度不能同时满足,优先满足假人H点与头部质心形成的角度;
s、用三坐标测量仪记录假人H点;

t、手放到方向盘3点和9点方向,如果够不到,方向盘前后可调,则往后调节方向盘,直到手能扶到;只有半只手的假人,手调节到45度。
附录:H点计算方法
以上定位中座椅H点是通过做好的Excel模板计算的,其计算方法如下:
首先,计算座椅升高比r=∆Z/∆X=(HPtFZ-HPtRZ)/(HPtRX-HPtFX)
HPtRZ:座椅中间最后位置H点相对足跟点Z向坐标;
HPtRX:座椅中间最后位置H点相对油门踏板参考点水平坐标;
HPtFZ:座椅中间最前位置H点相对足跟点Z向坐标;
HPtFX:座椅中间最前位置H点相对油门踏板参考点水平坐标;
升高比r应该大于等于0,表明座椅往前调时,H点是在升高的。
其次,计算座椅H点,
HPtX(相对踏板参考点,定位mm)=-15+0.433S+0.41W-【0.24/(1-0.3943r)]*[(HPtRZ+r(HPtRX-1054)]
w指方向盘中心到油门踏板参考点的X向距离;
s指:05假人=1151;50假人=1753;95假人=1870;
HPtZ(相对踏板参考点,定位mm)=HPtRZ+r(HPtRX-HPtX) 
编辑推荐





最新资讯
-
比亚迪叉车的智慧演变:从动力革新到
2025-04-02 09:15
-
重磅剧透!首批参展商名单曝光——这
2025-04-01 20:48
-
施耐德电气发布新一代Harmony XVB7模
2025-04-01 18:51
-
[转载] 机床巨头埃马克:百年跌宕再
2025-03-31 12:42
-
从4S店到修理厂:FLIR ONE Pro USB-C
2025-03-28 16:05