
工业机器人结构、驱动及技术指标
2017-06-01 13:29:56· 来源:机器人网
微信公众号

二、机器人的主要技术参数
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。
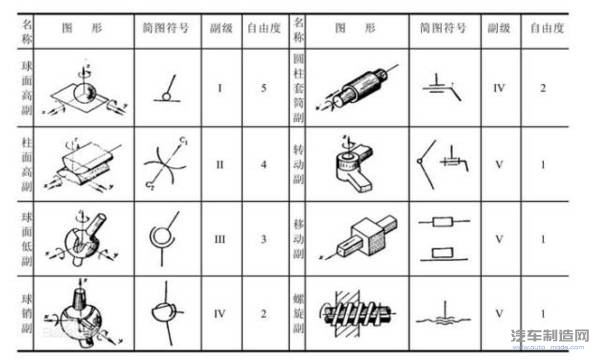
1、自由度
机器人具有的独立坐标轴运动的数目。 机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数目。手指的开、合,以及手指关节的自由度一般不包括在内。.机器人的自由度数一般等于关节数目。 机器人常用的自由度数一般不超过5~6个。
2、关节(Joint)
即运动副,允许机器人手臂各零件之间发生相对运动的机构。
3、工作空间
机器人手臂或手部安装点所能达到的所有空间区域。其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作空间通常用图解法和解析法两种方法进行表示。
4、工作速度
机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。
5、工作载荷
指机器人在工作范围内任何位置上所能承受的最大负载,一般用质量、力矩、惯性矩表示。 还和运行速度和加速度大小方向有关,一般规定高速运行时所能抓取的工件重量作为承载能力指标。
6、分辨率
能够实现的最小移动距离或最小转动角度。
7、精度
重复性或重复定位精度:指机器人重复到达某一目标位置的差异程度。或在相同的位置指令下,机器人连 续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。
本文导航:
- (1) 工业机器人常用运动学构形
- (2) 工业机器人的主要技术参数
- (3) 工业机器人常用材料
- (4) 工业机器人主要结构
- (5) 工业机器人的控制系统
举报 0
收藏 0
分享 112
-

2024海康机器人行业解决方案系列发布会
2024-10-14 -
2024年机器人行业5大发展趋势
2024-07-29 -

汽车制造新范式,AMR赋能汽车工业智造新蓝图
2024-06-20 -
浅谈汽车涂装机器人维护与保养
2024-05-28
编辑推荐





最新资讯
-
乘势而上,北汽极狐2025将继续极速前
2025-01-26 11:21
-
北汽蓝谷稳健前行,蓄势新一轮高质量
2025-01-26 10:52
-
叉车就在身边,大家都说好才是真的好
2025-01-17 10:10
-
昕特玛中国创新中心正式启用,加速本
2025-01-16 11:33
-
思看科技成功登陆上交所科创板!成为
2025-01-16 08:52