
黏合工艺的最佳搭档:杜尔公司与KUKA机器人
2017-06-30 13:56:22·
微信公众号

杜尔公司是一家全球领先的设备与系统提供商,公司地点位于德国的比蒂希海姆-比辛根。杜尔公司的足迹遍布全球28个国家的92处地点,拥有 16000 名员工并与顾客保持紧密的合作。该公司致力于为高效生产过程开发整合型综合解决方案,其 60% 的销售收入是通过与汽车行业制造商或供应商之间的业务达成的。作为自动化黏合工艺的交
杜尔公司是一家全球领先的设备与系统提供商,公司地点位于德国的比蒂希海姆-比辛根。杜尔公司的足迹遍布全球28个国家的92处地点,拥有 16000 名员工并与顾客保持紧密的合作。该公司致力于为高效生产过程开发整合型综合解决方案,其 60% 的销售收入是通过与汽车行业制造商或供应商之间的业务达成的。作为自动化黏合工艺的交钥匙系统提供商,杜尔担负为汽车行业开发人机合作型(HRC)机器人单元的工作。

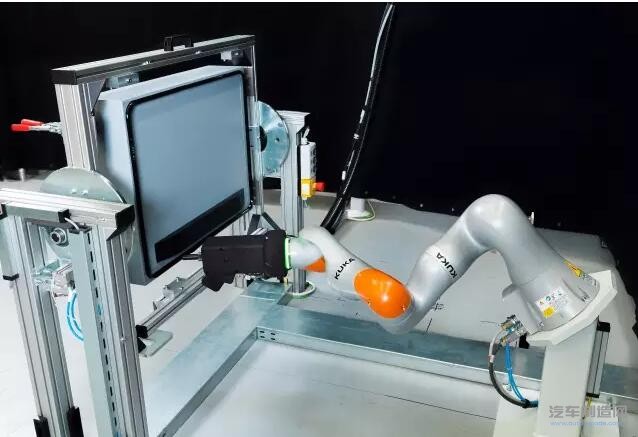
机器人与人类一起在终端装配线上工作而不需要采取物理保护措施。来自 KUKA 的敏感型LBR iiwa 低负载机器人担负起了 GPS 天线顶盖与汽车车身水箱的黏合工作。由于使用该机器人不仅提升了黏合质量,还节约了时间并降低了单位成本。而且,通过机器人的紧凑设计和操作员的简化处理,杜尔的客户可以从空间节省中获利。
LBR iiwa 机器人可以检测到安装 GPS 天线顶盖时出现的任何故障
当进入到 GPS 天线顶盖黏合工序时,装配工用人工方式将工件放置在机器人抓手上。抓手将工件裹住并将工件移动至应用塔上的黏合剂喷嘴处。KUKA LBR iiwa 型机器人将 GPS 天线顶盖缓慢的移动至黏合剂喷嘴处。
“由于有碰撞设计,当机器人遇到任何障碍时,它会略微后退并重新启动动作。”杜尔公司终端装配线 APT/黏合部门的总监 Dieter Ahlborn 在向我们解释 LBR iiwa 型机器人的人机合作能力时这样解释道。只有当三次尝试都不行的时候机器人才会退回到起始位置。正常情况下,在机器人通过时黏合工艺启动并将黏合剂仔细的注入,最后,工件会回到起始处,装配工将 GPS 天线顶盖取下并安装到车辆上。
.jpg)
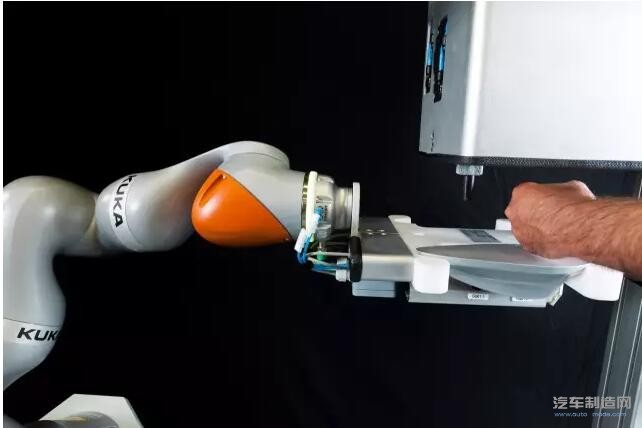
准确的黏合剂应用并根据情况将水箱装配到车身上
这是如何用 LBR iiwa 型机器人进行水箱黏合过程的说明:在最终装配线上,熟练的操作工利用控制器将水箱移动到一个翻转台上,先将其清洁,然后将其移动至正确的位置并移交给机器人以作下一步的加工。为防止黏合剂喷嘴干燥,该喷嘴是放置在密封贮液池中的。根据信号,机器人从贮液池旁移动出来并进入工作位置。在这里,黏合剂流到一个收集罐中并人工清洗黏合剂喷嘴。当移动到水箱的起始点位置时,喷嘴就会由于压力而打开,这样就不会产生任何气泡。此时,机器人会以非常均匀的方式将黏合剂注入到水箱上并通过其顶部的传感器保障检测出准确的装配尺寸。
“这项工作当然可以通过人工完成,但是人工完成的准确性不如使用机器人的高。”Ahlborn 解释说,用以机器人为基础的解决方案能够-与线性台架所不同的是 - 这种方案可以展现出黏合剂复杂的三维情况。由于有第七旋转轴的设计,KUKA LBR iiwa 型人机合作机器人能够在 360 度的范围实施黏合操作 - 既不需要重新定位也不需要将工件取下。一旦当机器人完成了其工作,熟练的操作工就可以将水箱直接装配在车身的特定位置。这处比较复杂的工作需要由操作工的个人技术来完成,在一些人体工程学不太合适的位置我们使用控制器来辅助动作。
人机合作(HRC)解决方案对于安全的高标准
在黏合工艺过程中虽然没有类似篱笆或栅栏的安全措施,但安全方面的要求是很高的。整个的安全设计理念必须满足用风险评估方式所得出的严格的参数范围和标准。其中有一条就是,要将机器人和操作员工直接接触的位置最小化。而且一旦发生接触时,机器人需要以千分之一秒的速度被关闭。因此,在黏合工艺操作单元的设计的总体原则是机器人的工作区域必须低于人类的头部和胸部范围。该应用技术包含重量较轻的黏合剂与轻负载机器人的配合,接触面范围很大且呈圆形,这就保证了一旦与机器人接触所产生的力量很小。“我们采用独家设计的能够适应人机协作实践新情况的系统技术。”Ahlborn 解释说。
人机合作解决方案:这代表着未来市场
人机合作的系统在汽车工业领域是主导性的系统。“在黏合领域我们已经销售 10 套系统。” Ahlborn 向我们披露说。用于水箱黏合的首套系统已于 2016 年三月在首个客户处投入使用,这也是为何杜尔公司对未来表示乐观的原因。“要感谢具备人机合作能力的 KUKA LBR iiwa 型机器人,我们希望在将来可以赢得更多的订单。” Ahlborn 说。不仅如此,以机器人为基础的人机合作解决方案也被用于小型的清洗器和其他零部件的黏合应用上,这项工作在比蒂希海姆-比辛根已经开始了。
机器人与人类一起在终端装配线上工作而不需要采取物理保护措施。来自 KUKA 的敏感型LBR iiwa 低负载机器人担负起了 GPS 天线顶盖与汽车车身水箱的黏合工作。由于使用该机器人不仅提升了黏合质量,还节约了时间并降低了单位成本。而且,通过机器人的紧凑设计和操作员的简化处理,杜尔的客户可以从空间节省中获利。
LBR iiwa 机器人可以检测到安装 GPS 天线顶盖时出现的任何故障
当进入到 GPS 天线顶盖黏合工序时,装配工用人工方式将工件放置在机器人抓手上。抓手将工件裹住并将工件移动至应用塔上的黏合剂喷嘴处。KUKA LBR iiwa 型机器人将 GPS 天线顶盖缓慢的移动至黏合剂喷嘴处。
“由于有碰撞设计,当机器人遇到任何障碍时,它会略微后退并重新启动动作。”杜尔公司终端装配线 APT/黏合部门的总监 Dieter Ahlborn 在向我们解释 LBR iiwa 型机器人的人机合作能力时这样解释道。只有当三次尝试都不行的时候机器人才会退回到起始位置。正常情况下,在机器人通过时黏合工艺启动并将黏合剂仔细的注入,最后,工件会回到起始处,装配工将 GPS 天线顶盖取下并安装到车辆上。
准确的黏合剂应用并根据情况将水箱装配到车身上
这是如何用 LBR iiwa 型机器人进行水箱黏合过程的说明:在最终装配线上,熟练的操作工利用控制器将水箱移动到一个翻转台上,先将其清洁,然后将其移动至正确的位置并移交给机器人以作下一步的加工。为防止黏合剂喷嘴干燥,该喷嘴是放置在密封贮液池中的。根据信号,机器人从贮液池旁移动出来并进入工作位置。在这里,黏合剂流到一个收集罐中并人工清洗黏合剂喷嘴。当移动到水箱的起始点位置时,喷嘴就会由于压力而打开,这样就不会产生任何气泡。此时,机器人会以非常均匀的方式将黏合剂注入到水箱上并通过其顶部的传感器保障检测出准确的装配尺寸。
“这项工作当然可以通过人工完成,但是人工完成的准确性不如使用机器人的高。”Ahlborn 解释说,用以机器人为基础的解决方案能够-与线性台架所不同的是 - 这种方案可以展现出黏合剂复杂的三维情况。由于有第七旋转轴的设计,KUKA LBR iiwa 型人机合作机器人能够在 360 度的范围实施黏合操作 - 既不需要重新定位也不需要将工件取下。一旦当机器人完成了其工作,熟练的操作工就可以将水箱直接装配在车身的特定位置。这处比较复杂的工作需要由操作工的个人技术来完成,在一些人体工程学不太合适的位置我们使用控制器来辅助动作。
人机合作(HRC)解决方案对于安全的高标准
在黏合工艺过程中虽然没有类似篱笆或栅栏的安全措施,但安全方面的要求是很高的。整个的安全设计理念必须满足用风险评估方式所得出的严格的参数范围和标准。其中有一条就是,要将机器人和操作员工直接接触的位置最小化。而且一旦发生接触时,机器人需要以千分之一秒的速度被关闭。因此,在黏合工艺操作单元的设计的总体原则是机器人的工作区域必须低于人类的头部和胸部范围。该应用技术包含重量较轻的黏合剂与轻负载机器人的配合,接触面范围很大且呈圆形,这就保证了一旦与机器人接触所产生的力量很小。“我们采用独家设计的能够适应人机协作实践新情况的系统技术。”Ahlborn 解释说。
人机合作解决方案:这代表着未来市场
人机合作的系统在汽车工业领域是主导性的系统。“在黏合领域我们已经销售 10 套系统。” Ahlborn 向我们披露说。用于水箱黏合的首套系统已于 2016 年三月在首个客户处投入使用,这也是为何杜尔公司对未来表示乐观的原因。“要感谢具备人机合作能力的 KUKA LBR iiwa 型机器人,我们希望在将来可以赢得更多的订单。” Ahlborn 说。不仅如此,以机器人为基础的人机合作解决方案也被用于小型的清洗器和其他零部件的黏合应用上,这项工作在比蒂希海姆-比辛根已经开始了。
举报 0
收藏 0
分享 102
-

2024海康机器人行业解决方案系列发布会
2024-10-14 -
2024年机器人行业5大发展趋势
2024-07-29 -

AMTS | 以智驭新,协作创造汽车行业新质生产力
2025-02-17 -

汽车制造新范式,AMR赋能汽车工业智造新蓝图
2024-06-20
编辑推荐





最新资讯
-
思看科技受邀出席第三届联合国教科文
2025-04-27 13:29
-
聚势谋远,智领新程——五菱柳机以硬
2025-04-27 13:22
-
聚势求新、智驱未来——五菱工业底盘
2025-04-27 13:22
-
向轻量化、智能化迈进,助力建设国家
2025-04-27 13:21
-
五菱工业:以“中国智造”领跑绿色未
2025-04-27 13:21