
基于VPG 的整车平顺性仿真
2017-10-21 18:39:17· 来源:华晨汽车工程研究院 作者:张博彬,赵春吉,汤洪澎
微信公众号

4.1.2 时域仿真分析
由4.1.1 节中的结果可分析得出Z 轴向振动加速度峰值远大于X、Y 轴向,说明在仿真试验中Z 轴方向,亦即垂直方向的振动是最为剧烈的。
X 轴向振动最轻,且远小于另两个轴向,这是由于在像60km/ h 这样的中低车速下,X 轴上的惯性力相对较小,由不平路面引发的侧向振动通常是略大于前进方向振动的。
通过各轴向加速度波振幅随时间推移的衰减趋势可见,本轿车模型中轮胎与悬架缓和冲击与振动的作用是明显的,且在约0.08s 左右便使各轴向的振动趋于平缓,可见响应速度很快。这种较高的响应灵敏度也正是我们希望悬架系统能够在车辆行驶路况发生突变时所具备的能力。它不仅关乎行驶舒适性,还在一定程度上影响到驾驶人注意力的更好集中,从而在一定程度上提高行驶安全性。
此外,通过对比X 轴向与Z 轴向加速度曲线还可以发现,直观地讲,X 轴向加速度波形不如Z 轴向波形密集,就是说,X 轴向加速度波形振动频率较小。这说明两个轴向振动主导的影响因素是不同的。通过分析可知,X 轴向(即前进方向) 的振动主要是由于整车刚体惯性力与前进速度共同决定,而Z 轴向(即垂直方向) 的振动主要是由于随机路面激励谱与车速共同决定。随机路面具有很高的空间频率,这解释了上述现象的产生。
至于加速度波峰值是否与实际情况相符,还需要通过频域分析间接求得总加速度均方根值,在与主观评价法标准值比对后方可得出结论。后文将有详细探讨。
4.2 频域仿真结果分析
4.2.1 频域仿真结果
由于时域分析的局限性,还需进一步采用频域分析来全面展现振动环境的影响。图25 ~ 图27 分别列出了X、Y、Z三个轴向的加速度时间历程信号在快速傅里叶变换下所得的
频域功率谱密度曲线。
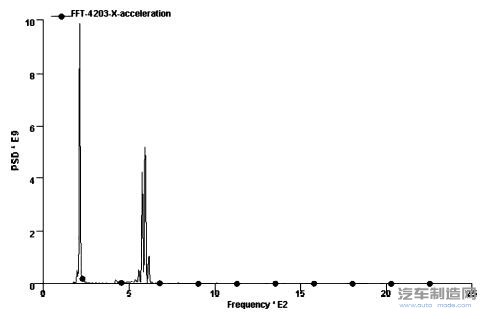
图25 X 轴向加速度功率谱密度
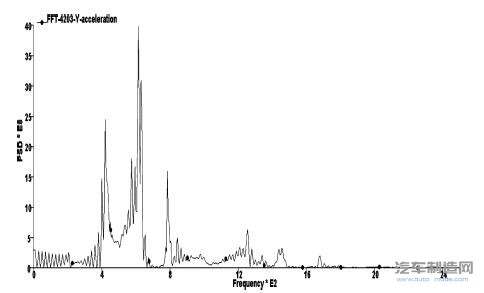
图26 Y 轴向加速度功率谱密度
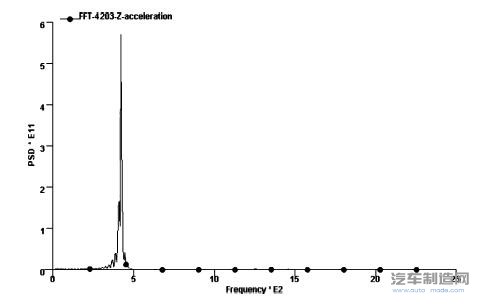
图27 Z 轴向加速度功率谱密度
由图25 ~ 图27 可见,在其余条件相同,且车速为60km/ h 的情况下,Z 轴向的加速度功率谱密度在4Hz 附近出现了较大波峰。X 轴向与Y 轴向的加速度功率谱密度从图上看来虽有多处波峰,但不应忽略其纵坐标单位的数量级分别是E9 与E8,与Z 轴的E11 分别相差10 倍与100 倍,故与Z 轴向纵坐标值相比可忽略不计,亦即视为无较大波峰出现。因此,对于Z 轴向,其加速度功率谱密度在4Hz 附近出现了较大波峰。
编辑推荐





最新资讯
-
旭化成微电子开始批量生产用于环保发
2025-04-24 16:00
-
华为、地平线、大众、东风、起亚等引
2025-04-24 08:27
-
全球产业链聚沪 共探双碳新路径 SNEC
2025-04-18 18:05
-
柯马签订具有约束力的协议收购 Autom
2025-04-17 13:01
-
高效协同新范式:比亚迪叉车领创智能
2025-04-17 10:04