
基于VPG 的整车平顺性仿真
2017-10-21 18:39:17· 来源:华晨汽车工程研究院 作者:张博彬,赵春吉,汤洪澎
微信公众号

4.2.2 频域仿真分析
由4.2.1 节中的结果可分析得出,Z 轴向加速度功率谱密度的最大波峰比X 轴和Y 轴两向加速度功率谱密度的最大波峰都要大,且X 轴向最大峰值大于Y 轴向最大峰值。Y 轴向峰值最低,且远小于另两个轴向,这是由于仿真试验所建立的模型过于理想: 整车左右质量分布均匀,未考虑制动器的安装,且左右两侧轮胎所接触路面无倾斜等因素综合导致。
Z 轴向峰值最大,符合实际情况,证明来自随机不平路面的激振是车身振动的最主要来源,与时域的仿真分析结果相符。
对于X 轴与Z 轴两向,随着频率的增大,功率谱密度波峰呈逐渐减小趋势,Y 轴向波峰虽有一定起伏,但三者各自较大的波峰都主要集中在低频段。由«汽车理论» 可知,人体对于振动最敏感的频率范围约为4 ~12.5Hz。通过对图线的观察,在4 ~12.5Hz 范围内,X 轴和Y 轴方向都未出现较大波峰,而Z 轴方向则出现了1 次很大的波峰,其最大值出现在4Hz 处。由于仿真时间较短,仅从极大波峰出现次数无法断定本试验的平顺性较好,但可以推知其Z 轴向的振动有可能引起乘员的不适,并且Z 轴向的“最有害” 频率在4Hz 处,应当设法避开这一频率。
4.2.3 主观评价分析
如果觉得客观评价法得到的结果并不符合乘员的直观感受,可以使用主观评价法,通过比对表3 给出的标准值得出一般情况下的直观感受。
因为在前述时域与频域分析结果中,Z 轴向不管加速度峰值还是加速度功率谱密度峰值都是最大的,故本文为简化问题,仅考虑Z 轴向振动,直接计算Z 轴向的加权加速度均方根值来参与评价。
由4.2.1 所得仿真结果,根据功率谱密度,可计算出采用刚性悬架、刚体车身的模型在既定试验条件下Z 轴的加权加速度均方根值。计算结果如表4 所示。
表4
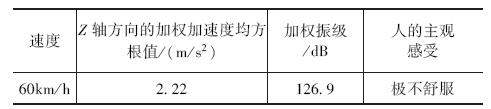
由表4 可见,本次仿真试验所得主观评价结果所体现出的平顺性并不理想。经分析,出现上述情况的原因可归结为以下几点:
1) 由于仿真试验在C级波纹路面上进行,不平度波动较大,故车辆振动更为强烈。
2) 由于未计算三轴向的总加权加速度均方根值,评价结果会略差于预期。
3) 本次仿真数据采集点的位置是驾驶人座椅中心处一点,由于缺少座椅的减振效果,该点的加权加速度均方根值会加大3 ~5 倍。由此可反推知,实际情况下,本文所建模型的加权加速度均方根值约在0.33 ~ 0.94m/ s2 范围内,而且在60km/ h 车速以下,人体感觉稍有不舒服,从而验证了所建模型的真实性、合理性及虚拟仿真研究方法的可行性。
4.3 仿真过程存在的不足之处
由于本文作者水平及试验条件所限,本文的仿真过程尚存在以下主要问题:
1) 仅考虑了刚性悬架的情况,未建立刚柔耦合悬架的仿真模型。
2) 仅考虑了刚体车身的情况,未对车身做柔化处理。
3) 在建立仿真模型的过程中对整车做了较大简化,仅考虑了悬架、轮胎、车身三大部分,与实车存在一定差距,尤其是缺少发动机振动,造成仿真结果的不精确。
4) 未对钢板弹簧悬架模型进行刚度曲线的拟合,可能与设计值不符。
5) 未对实车进行实地试验,目前还无从得知仿真结果与实际试验结果有多大差距。
4.4 本章小结
本章通过对一定车速、胎压、悬架阻尼及刚度试验条件下所求得的X、Y、Z 三个轴向振动加速度—时间曲线和加速度功率谱密度—频率曲线利用加权加速度均方根值法与主观评价法进行比较与分析,得出了一般性结论,找到了“最有害” 频率,在理论与实际间建立起了联系,从而验证了利用VPG 软件进行平顺性仿真的合理性与可靠性。最后还总结了本次仿真存在的不足之处,以期在后续的研究与试验中多加改进并进行进一步的分析。
编辑推荐





最新资讯
-
旭化成微电子开始批量生产用于环保发
2025-04-24 16:00
-
华为、地平线、大众、东风、起亚等引
2025-04-24 08:27
-
全球产业链聚沪 共探双碳新路径 SNEC
2025-04-18 18:05
-
柯马签订具有约束力的协议收购 Autom
2025-04-17 13:01
-
高效协同新范式:比亚迪叉车领创智能
2025-04-17 10:04