
从V2X用例解密汽车工业和5G的技术需求关键性指标
2017-11-16 14:07:38· 来源:朱伟华后市场
微信公众号

在数字化运输和物流的远程感知和控制方面,类似于物联网世界内的其他用例,远程传感器和车辆的控制是基于遥测和命令消息的传输,在一定的延迟或数据速率下,并不具有迫切的要求。然而,更具有挑战性的是,它们必须能在车辆熄火,甚至在地下停车场的情况下工作。
在本文中展示的用例细节取决于场景和行驶条件,它不可能考虑到未来所有的可能情况。因此,这些用例是基于历史经验、专家的意见和仿真结果总结得到的。它们将给大家提供一个数量级的概念,而不是一个确切的值。
在数字化运输和物流的远程感知和控制方面,类似于物联网世界内的其他用例,远程传感器和车辆的控制是基于遥测和命令消息的传输,在一定的延迟或数据速率下,并不具有迫切的要求。然而,更具有挑战性的是,它们必须能在车辆熄火,甚至在地下停车场的情况下工作。
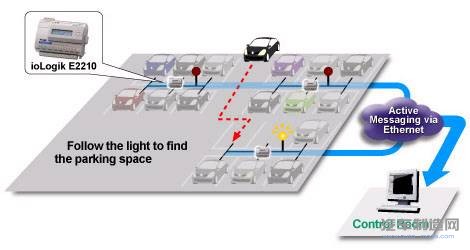
这要求的穿透能力(特别是通过墙壁和地板)和功率能效已经超越了当前商业4G网络所能提供的水平,以便实现良好的覆盖水平,并增加车辆电池的寿命。这些方面已经在最近的标准化工作和讨论中有所描述,LTE Rel 12特别解决方案为达到10年电池寿命的两节AA电池,覆盖范围扩展15dB的需求被指定为Rel 13。但我们是不是应该能在5G版本中再进一步要求一下15年电池寿命和30dB?
此外,由于车辆可以解锁甚至远程启动,安全方面也应该避免车辆被潜在的黑客盗取信息甚至控制。这个用例的主要要求如下︰
1. 低功耗(相当于或低于4G);
2. 高穿透性能,可以通过墙壁、地板或者其他地下停车点;
3. 在应用程序层,端到端低于1s延迟;
4. 非常强的安全机制。
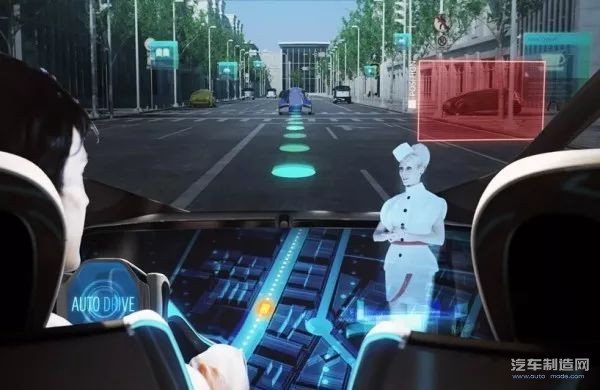
而在车辆的远程处理方面,将根据从车外到通信基础设备的处理过程,在时延方面的要求可能会非常严格,也可能不严格。例如,根据变化后的道路条件,在没有大问题的情况下更新计算行程可能需要几秒钟,而在现实中,通过强化应用程序,行程呈现在挡风玻璃上应该在几毫秒内完成。一般情况下,远程处理需要采集通信基础设备上传车辆传感器捕获的所有信息,这样的带宽要求就可能要高达100M bit/s。此外,远程处理单元应跟随道路上行驶的车辆,这也需要低延迟一个特别的交接机制,所以虚拟机需要被从一个基站快速转移到下一个基站。
路上信息社交方面,这个用例主要在时速将近200 km/h的车辆和覆盖良好的公路基础设施上,需要通信链路具有高数据速率(十几M bit/s)和低延迟。此外,为了弥补车体对信号的屏蔽,需要提高穿透损失率,信号强度应该达到15-20dB。

上面提供的KPI必须在不同的物理情况下实现——例如,发射和接收车辆的距离、相对速度及车辆密度——在一定条件下每辆车提供的负荷。例如,当车辆距离基站10米远的地方,它可能比较容易实现10毫秒延迟与99.999%的可靠性,以相同的速度,在空荡荡的街道以同一方向行驶。而如果车辆是500米远,在相反的方向,在拥挤的街道,这将是更大的挑战。如果要达到同样的目标,在那里它们就需要与许多其他车辆共享无线通讯信道。
表 不同条件下需要满足的延迟和可靠性

这些条件背后的理念是:
车辆密度︰
城市环境中,我们假设每辆车占据6-12米的空间(4米车辆再加上2-8米的差距)。我们假设每个方向有2-3条车道的这种类型,那么就可以导致有1000-3000辆/平方公里。对于郊区的推导同样,我们使用2条车道及8-20米的差距。对于高速公路场景,假定在同一条车道上60米的安全距离(高密度为12米),相关反应时间为1.8秒和平均时速为120 km/h(高密度为24 km/h)。
相对速度︰
为了获得这些值,我们考虑最大允许速度(50 km/h、100 km/h)和在一辆车最大可能的速度(250 km/h)。汽车制造商限制汽车速度在250 km/h(跑车可能不被限制)。
通信范围︰
在城市环境中,在附近的汽车是主要交互的伙伴,因此认为适当的范围在50-100米。相对于其他速度,我们选择这样的范围是因为市区汽车密集并且都保持一定的刹车距离(在对应的速度下)。
提供负载︰
从平均情况来预计,大量的数据流量将在城市市区和高速公路环境中传输。城市市区环境提供高密度的信息,因而许多信息对象被发送到车辆。高速公路方案包括快速传输,需要更多预见和更多信息向汽车发送。郊区的环境通常不是那么密集,传输会相对缓慢。

应该指出的是,这里给出的最大密度和速度值通常不会同时出现,例如,在高速公路汽车密度为100辆/平方公里情况下,车辆通常会以远低于250 km/h的最高速度行驶。粗略地讲,车辆密度和速度往往是负相关——面积稠密地区人口密度越大,车辆移动越慢——而速度和必需的通信范围呈正相关——车辆移动的速度越快,它需要进行的通信传输也越快。因此,密度和所需的范围往往呈负相关——密度越大,车距就越短,车辆就越需要沟通。
在数字化运输和物流的远程感知和控制方面,类似于物联网世界内的其他用例,远程传感器和车辆的控制是基于遥测和命令消息的传输,在一定的延迟或数据速率下,并不具有迫切的要求。然而,更具有挑战性的是,它们必须能在车辆熄火,甚至在地下停车场的情况下工作。
这要求的穿透能力(特别是通过墙壁和地板)和功率能效已经超越了当前商业4G网络所能提供的水平,以便实现良好的覆盖水平,并增加车辆电池的寿命。这些方面已经在最近的标准化工作和讨论中有所描述,LTE Rel 12特别解决方案为达到10年电池寿命的两节AA电池,覆盖范围扩展15dB的需求被指定为Rel 13。但我们是不是应该能在5G版本中再进一步要求一下15年电池寿命和30dB?
此外,由于车辆可以解锁甚至远程启动,安全方面也应该避免车辆被潜在的黑客盗取信息甚至控制。这个用例的主要要求如下︰
1. 低功耗(相当于或低于4G);
2. 高穿透性能,可以通过墙壁、地板或者其他地下停车点;
3. 在应用程序层,端到端低于1s延迟;
4. 非常强的安全机制。
而在车辆的远程处理方面,将根据从车外到通信基础设备的处理过程,在时延方面的要求可能会非常严格,也可能不严格。例如,根据变化后的道路条件,在没有大问题的情况下更新计算行程可能需要几秒钟,而在现实中,通过强化应用程序,行程呈现在挡风玻璃上应该在几毫秒内完成。一般情况下,远程处理需要采集通信基础设备上传车辆传感器捕获的所有信息,这样的带宽要求就可能要高达100M bit/s。此外,远程处理单元应跟随道路上行驶的车辆,这也需要低延迟一个特别的交接机制,所以虚拟机需要被从一个基站快速转移到下一个基站。
路上信息社交方面,这个用例主要在时速将近200 km/h的车辆和覆盖良好的公路基础设施上,需要通信链路具有高数据速率(十几M bit/s)和低延迟。此外,为了弥补车体对信号的屏蔽,需要提高穿透损失率,信号强度应该达到15-20dB。
上面提供的KPI必须在不同的物理情况下实现——例如,发射和接收车辆的距离、相对速度及车辆密度——在一定条件下每辆车提供的负荷。例如,当车辆距离基站10米远的地方,它可能比较容易实现10毫秒延迟与99.999%的可靠性,以相同的速度,在空荡荡的街道以同一方向行驶。而如果车辆是500米远,在相反的方向,在拥挤的街道,这将是更大的挑战。如果要达到同样的目标,在那里它们就需要与许多其他车辆共享无线通讯信道。
表 不同条件下需要满足的延迟和可靠性
这些条件背后的理念是:
车辆密度︰
城市环境中,我们假设每辆车占据6-12米的空间(4米车辆再加上2-8米的差距)。我们假设每个方向有2-3条车道的这种类型,那么就可以导致有1000-3000辆/平方公里。对于郊区的推导同样,我们使用2条车道及8-20米的差距。对于高速公路场景,假定在同一条车道上60米的安全距离(高密度为12米),相关反应时间为1.8秒和平均时速为120 km/h(高密度为24 km/h)。
相对速度︰
为了获得这些值,我们考虑最大允许速度(50 km/h、100 km/h)和在一辆车最大可能的速度(250 km/h)。汽车制造商限制汽车速度在250 km/h(跑车可能不被限制)。
通信范围︰
在城市环境中,在附近的汽车是主要交互的伙伴,因此认为适当的范围在50-100米。相对于其他速度,我们选择这样的范围是因为市区汽车密集并且都保持一定的刹车距离(在对应的速度下)。
提供负载︰
从平均情况来预计,大量的数据流量将在城市市区和高速公路环境中传输。城市市区环境提供高密度的信息,因而许多信息对象被发送到车辆。高速公路方案包括快速传输,需要更多预见和更多信息向汽车发送。郊区的环境通常不是那么密集,传输会相对缓慢。
应该指出的是,这里给出的最大密度和速度值通常不会同时出现,例如,在高速公路汽车密度为100辆/平方公里情况下,车辆通常会以远低于250 km/h的最高速度行驶。粗略地讲,车辆密度和速度往往是负相关——面积稠密地区人口密度越大,车辆移动越慢——而速度和必需的通信范围呈正相关——车辆移动的速度越快,它需要进行的通信传输也越快。因此,密度和所需的范围往往呈负相关——密度越大,车距就越短,车辆就越需要沟通。




编辑推荐





最新资讯
-
旭化成微电子开始批量生产用于环保发
2025-04-24 16:00
-
华为、地平线、大众、东风、起亚等引
2025-04-24 08:27
-
全球产业链聚沪 共探双碳新路径 SNEC
2025-04-18 18:05
-
柯马签订具有约束力的协议收购 Autom
2025-04-17 13:01
-
高效协同新范式:比亚迪叉车领创智能
2025-04-17 10:04